用單支MTw Awinda慣性測量單元在多層樓內(nèi)實(shí)時(shí)跟蹤行人
意大利帕爾馬大學(xué)工程與建筑系物聯(lián)網(wǎng)實(shí)驗(yàn)室聯(lián)合私企、多所國內(nèi)外大學(xué)和各地研究所共同研究物聯(lián)網(wǎng)和智能系統(tǒng),。
定位和導(dǎo)航
物聯(lián)網(wǎng)實(shí)驗(yàn)室的主要研究方向是定位和導(dǎo)航,,在不同的環(huán)境條件下確定物體和設(shè)備的位置、跟蹤它們的移動(dòng),,創(chuàng)造物聯(lián)網(wǎng)多種契機(jī):基于位置的服務(wù),、訪問控制、行為監(jiān)測,、苛刻環(huán)境中的導(dǎo)航,。

圖1,Xsens公司MTw Awinda慣性測量單元放置在腳部,,用鞋帶固定,。
目前市場上基于GPS的技術(shù)在室外應(yīng)用良好,但是這些技術(shù)在市區(qū)內(nèi)和室內(nèi)環(huán)境中時(shí),,可靠性和精度大幅降低,。我們實(shí)驗(yàn)室的目標(biāo)是開發(fā)方便易用、精確,、可以在未知環(huán)境中定位跟蹤的系統(tǒng),。在目前我們考慮范圍內(nèi)的技術(shù)里,基于慣性技術(shù)的導(dǎo)航是最有前途的,。在理想狀態(tài)下,,我們可以通過使用慣性傳感器(例如:加速度計(jì)和陀螺儀)記錄數(shù)據(jù),,并在任何環(huán)境中重建運(yùn)動(dòng)物體的軌跡,,而這不需要依靠外部的基礎(chǔ)設(shè)施(在我們的研究中指的是光學(xué)動(dòng)捕系統(tǒng)),也不依靠其他信號(hào)(例如:基于GPS的解決方案),。
遺憾的是在現(xiàn)實(shí)案例中,,想要精確地跟蹤位置和方向是很難的,這是由于影響傳感器測量的噪聲導(dǎo)致的,,噪聲可以導(dǎo)致數(shù)據(jù)漂移現(xiàn)象,,讓系統(tǒng)長期處于不可靠狀態(tài)。因此,,優(yōu)秀的解決方案應(yīng)當(dāng)使用優(yōu)質(zhì)傳感器和針對(duì)項(xiàng)目而揀選的技術(shù),,以降低誤差,尤其是在傳感器數(shù)量有限,、降低復(fù)雜度和壓縮成本時(shí),。
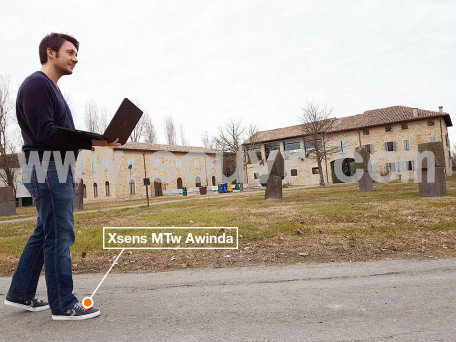
圖2,系統(tǒng)綜述:慣性測量單元放置在腳部,,Xsens適配器與筆記本電腦相連,。筆記本運(yùn)行算法。行人兜里內(nèi)裝手機(jī),用于提供網(wǎng)絡(luò)連接和GPS參考,。
行人的航位推測法(PDF)
在我們的科研項(xiàng)目里,,我們開發(fā)出了一套行人航位推測系統(tǒng),系統(tǒng)使用一支Xsens公司出品的MTw Awinda傳感器,,傳感器放置在行人的鞋面上,,作用是重建行人的三維運(yùn)動(dòng)軌跡。傳感器被鞋帶固定在鞋面上,,采集的數(shù)據(jù)通過筆記本上的適配器傳輸?shù)焦P記本電腦里,。筆記本上運(yùn)行的MatLab軟件程序由Xsens公司提供的API生成,用于讀取和處理采集的數(shù)據(jù),。
每當(dāng)系統(tǒng)檢測到支撐相時(shí),,系統(tǒng)就會(huì)計(jì)算出腳部的三維位移。修改版的ZUPT算法是由擺動(dòng)相時(shí)傳感器記錄的線性加速度雙積分組成的,,用途是計(jì)算水平運(yùn)動(dòng),。MTw內(nèi)置的氣壓計(jì)的讀數(shù)可用于計(jì)算位移的垂直高度。如圖2所示,。
獲取三維位置的過程是:先轉(zhuǎn)換經(jīng)度,、緯度和高度坐標(biāo)系,然后用臨時(shí)執(zhí)行的API程序把它們發(fā)送到網(wǎng)絡(luò)服務(wù)器,。為了實(shí)現(xiàn)這個(gè)過程,,行人兜里存放的手機(jī)負(fù)責(zé)提供上網(wǎng)。手機(jī)也用于接收GPS位置,,目的是做對(duì)比,。
網(wǎng)絡(luò)服務(wù)器記錄坐標(biāo)系,用直觀的網(wǎng)絡(luò)界面輸出位置信息,,通過這樣的方式,,行人可以在筆記本上的地圖里看到自己的行進(jìn)路線。

圖3,,網(wǎng)絡(luò)界面實(shí)時(shí)監(jiān)視估計(jì)的路徑,。
測試是在意大利帕爾馬大學(xué)校園內(nèi)完成的。網(wǎng)頁界面主要是由地圖和智能手機(jī)的GPS信息組成,。地圖上藍(lán)色的路線是由慣性導(dǎo)航系統(tǒng)估計(jì)的,,紅點(diǎn)代表GPS信號(hào)。此外,,網(wǎng)頁界面還顯示了地北,、多層樓的樓層估計(jì),以及GPS的精度,。
物聯(lián)網(wǎng)實(shí)驗(yàn)室
意大利帕爾馬大學(xué)工程與建筑系物聯(lián)網(wǎng)實(shí)驗(yàn)室聯(lián)合私企,、多所國內(nèi)外大學(xué)和各地研究所研究物聯(lián)網(wǎng)和智能系統(tǒng),。目前科研隊(duì)伍共有八名全職人員,他們是學(xué)院的教師,、博士后,、博士生和研究員并一同積極合作。物聯(lián)網(wǎng)實(shí)驗(yàn)室目前研究的三大交織領(lǐng)域如下:
- 信號(hào)處理
- 現(xiàn)代通信與網(wǎng)絡(luò)
- 物聯(lián)網(wǎng)與智能系統(tǒng)
所有科研活動(dòng)的主要原則就是跨學(xué)科性,。我們實(shí)驗(yàn)室發(fā)表的論文已在大量科學(xué)出版物上發(fā)表,,有幾個(gè)論文還在國外先進(jìn)的論壇上獲獎(jiǎng),實(shí)驗(yàn)室目前擁有大型試驗(yàn)臺(tái)(內(nèi)置模塊超過一百五十個(gè)),,包括眾多無線連接標(biāo)準(zhǔn),。
本實(shí)驗(yàn)室采購的Xsens設(shè)備由北約科技組織出資購買,用于現(xiàn)代導(dǎo)航研發(fā)項(xiàng)目(用可穿戴生物傳感器和生理模型增強(qiáng)單兵作戰(zhàn)效率)的研究,。
 打印本文
打印本文 關(guān)閉窗口
關(guān)閉窗口