使用Phantom omni力反饋設(shè)備控制機(jī)器人
傳統(tǒng)的工業(yè)機(jī)器人普遍采用電機(jī) ,、齒輪減速器 ,、關(guān)節(jié)軸三者直接連接的傳動(dòng)機(jī)構(gòu),這種機(jī)構(gòu)要求電機(jī)與減速器安裝在機(jī)械臂關(guān)節(jié)附近,,其缺點(diǎn)是對(duì)于多關(guān)節(jié)機(jī)械臂,,下一級(jí)關(guān)節(jié)的電機(jī)與減速器等驅(qū)動(dòng)裝置成為上一級(jí)關(guān)節(jié)的額外負(fù)載 。這一額外負(fù)載帶來的負(fù)面影響往往超過機(jī)械臂連桿等必要結(jié)構(gòu)件,,因此提高了對(duì)機(jī)械臂動(dòng)力和驅(qū)動(dòng)元件的要求,,由此造成整體重量 、體積 ,、造價(jià)和內(nèi)部消耗的增加,,降低了機(jī)械臂對(duì)外做功的能力和效率。為了避免這一問題許多主動(dòng)式醫(yī)療機(jī)器人采用繩驅(qū)動(dòng)方式,,使用柔性繩索遠(yuǎn)距離的傳遞運(yùn)動(dòng)和力矩,。將驅(qū)動(dòng)裝置安裝到遠(yuǎn)離相關(guān)關(guān)節(jié)的基座上,使得整個(gè)機(jī)械臂的結(jié)構(gòu)緊湊?,,在減輕機(jī)械臂整體重量的同時(shí)提高了對(duì)外做功的能力,。下圖所示的就是達(dá)芬奇手術(shù)機(jī)器人的末端夾子,采用繩驅(qū)動(dòng)方式可以在較小的機(jī)械結(jié)構(gòu)內(nèi)實(shí)現(xiàn)多自由度的靈活運(yùn)動(dòng):

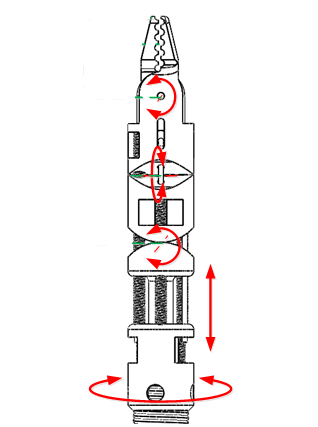
下面嘗試在VREP中使用力反饋設(shè)備Phantom omni來控制醫(yī)療機(jī)器人的末端夾子,。機(jī)構(gòu)簡(jiǎn)圖如下圖所示,,一共有5個(gè)自由度:其中移動(dòng)自由度負(fù)責(zé)進(jìn)給,一個(gè)整體旋轉(zhuǎn)自由度,,還有兩個(gè)左右,、上下彎曲的自由度,最后是控制夾子張合的自由度,。
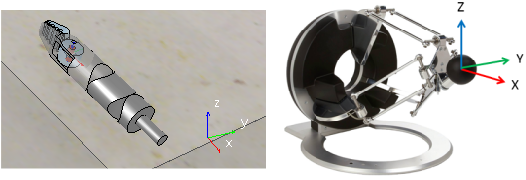
刪除Solidworks CAD模型中的一些不必要特征,,比如倒角、內(nèi)部孔,、螺紋孔等,,導(dǎo)出成STL文件,再導(dǎo)入到VREP中,。然后還需要進(jìn)行繼續(xù)化簡(jiǎn),,減少網(wǎng)格數(shù)量,當(dāng)網(wǎng)格數(shù)減少到不影響幾何外觀就可以了,。接下來在相應(yīng)的位置添加關(guān)節(jié),,設(shè)置關(guān)節(jié)運(yùn)動(dòng)范圍(軟件限位),,并將其設(shè)為Inverse kinematics模式。

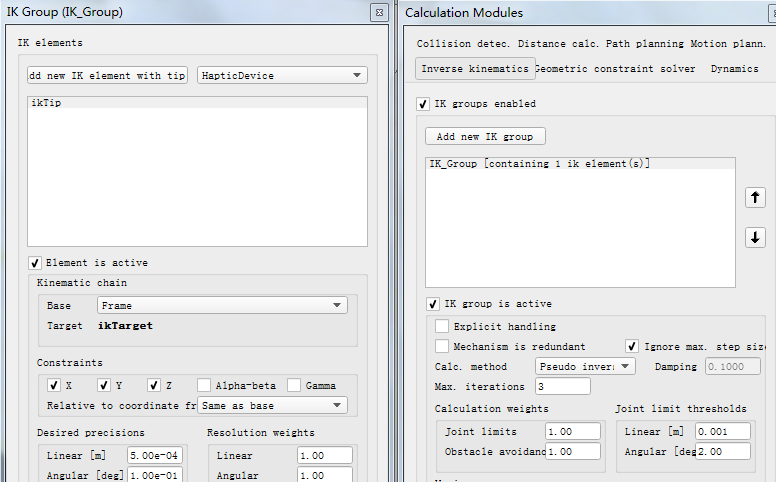
設(shè)置Calculation Modules中的Inverse kinematics:
搭建好模型后可以先用鍵盤進(jìn)行測(cè)試,,按方向鍵移動(dòng)ikTarget,,VREP會(huì)根據(jù)構(gòu)型自動(dòng)計(jì)算運(yùn)動(dòng)學(xué)逆解,然后將ikTip移動(dòng)到ikTarget處(這樣就會(huì)帶著整個(gè)機(jī)構(gòu)運(yùn)動(dòng)),。
鍵盤控制的腳本代碼如下:
- if?(sim_call_type==sim_childscriptcall_initialization)?then ?
- ?
- ????--?Put?some?initialization?code?here ?
- ????targetHandle?=?simGetObjectHandle('ikTarget') ?
- ?
- ?
- end ?
- ?
- ?
- if?(sim_call_type==sim_childscriptcall_actuation)?then ?
- ?
- ????--?Put?your?main?ACTUATION?code?here ?
- ?
- end ?
- ?
- ?
- ?
- if?(sim_call_type==sim_childscriptcall_sensing)?then ?
- ?
- ????--?Put?your?main?SENSING?code?here ?
- ????--?Read?the?keyboard?messages?(make?sure?the?focus?is?on?the?main?window,?scene?view): ?
- ????message,?auxiliaryData?=?simGetSimulatorMessage() ?
- ?
- ????if?(message?==?sim_message_keypress)?then ?
- ?
- ????????if?(auxiliaryData[1]==119)?then ?
- ????????????--?W?key ?
- ????????????local?p?=?simGetObjectPosition(targetHandle,?-1) ?
- ????????????p[1]?=?p[1]?-?0.001 ?
- ????????????simSetObjectPosition(targetHandle,?-1,?p) ?
- ????????end ?
- ????????if?(auxiliaryData[1]==115)?then ?
- ????????????--?S?key ?
- ????????????local?p?=?simGetObjectPosition(targetHandle,?-1) ?
- ????????????p[1]?=?p[1]?+?0.001 ?
- ????????????simSetObjectPosition(targetHandle,?-1,?p) ?
- ????????end ?
- ?
- ?
- ????????if?(auxiliaryData[1]==2007)?then ?
- ????????????--?up?key ?
- ????????????local?p?=?simGetObjectPosition(targetHandle,?-1) ?
- ????????????p[3]?=?p[3]?+?0.001 ?
- ????????????simSetObjectPosition(targetHandle,?-1,?p) ?
- ????????end ?
- ????????if?(auxiliaryData[1]==2008)?then ?
- ????????????--?down?key ?
- ????????????local?p?=?simGetObjectPosition(targetHandle,?-1) ?
- ????????????p[3]?=?p[3]?-?0.001 ?
- ????????????simSetObjectPosition(targetHandle,?-1,?p) ?
- ????????end ?
- ?
- ?
- ????????if?(auxiliaryData[1]==2009)?then ?
- ????????????--?left?key ?
- ????????????local?p?=?simGetObjectPosition(targetHandle,?-1) ?
- ????????????p[2]?=?p[2]?-?0.001 ?
- ????????????simSetObjectPosition(targetHandle,?-1,?p) ?
- ????????end ?
- ????????if?(auxiliaryData[1]==2010)?then ?
- ????????????--?right?key ?
- ????????????local?p?=?simGetObjectPosition(targetHandle,?-1) ?
- ????????????p[2]?=?p[2]?+?0.001 ?
- ????????????simSetObjectPosition(targetHandle,?-1,?p) ?
- ????????end ?
- ?
- ????end ?
- end ?
- ?
- ?
- if?(sim_call_type==sim_childscriptcall_cleanup)?then ?
- ?
- ????--?Put?some?restoration?code?here ?
- ?
- end?
?
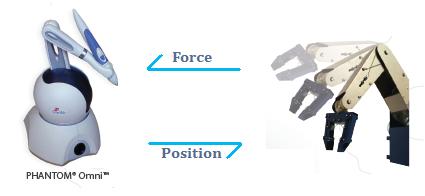
測(cè)試沒問題后可以使用CHAI3D插件來連接力反饋設(shè)備,。這里采用增量控制的模式,即計(jì)算當(dāng)前時(shí)刻與前一時(shí)刻手柄位置在X,、Y,、Z方向上的差,然后控制VREP中的ikTarget控制點(diǎn)按相應(yīng)的增量移動(dòng),。注意在VREP中機(jī)器人向前運(yùn)動(dòng)是沿X軸負(fù)方向,、向上運(yùn)動(dòng)是沿Z軸正方向、向右運(yùn)動(dòng)是沿Y軸正方向,,這與CHAI3D中坐標(biāo)系的定義一致(向前推手柄是沿著X軸負(fù)方向...),,因此可以使用力反饋設(shè)備直觀的控制機(jī)器人的運(yùn)動(dòng)。當(dāng)然如果坐標(biāo)系定義不一致,,需要進(jìn)行簡(jiǎn)單的轉(zhuǎn)換才行,。
下面的代碼在sensing探測(cè)部分會(huì)使用simExtCHAI3D_readPosition來讀取當(dāng)前操作手柄的位置和按鈕狀態(tài)。按照VREP默認(rèn)設(shè)置,,這部分代碼會(huì)50ms執(zhí)行一次,,這里會(huì)出現(xiàn)一個(gè)問題:如果采樣速率太快,會(huì)導(dǎo)致前后兩次采集到的位置數(shù)據(jù)偏差為零(人手的操作頻率沒那么快,,還來不及改變位置),,那么輸出的控制量就一直是零,這樣就沒辦法用增量控制的方式來操控機(jī)器人,。解決辦法是延遲幾個(gè)周期再采樣,等到有足夠大的偏差之后再生成控制量,。還有一個(gè)問題是使用CHAI3D返回的數(shù)據(jù)以“米”為單位,,而VREP世界中的單位有可能未知,那么使用增量控制時(shí)需要對(duì)控制量乘一個(gè)比例系數(shù),,避免因操作端微小的移動(dòng)造成從動(dòng)端運(yùn)動(dòng)量過大,,超出關(guān)節(jié)限制(無法到達(dá)的逆解)?;蛘呖梢哉{(diào)節(jié)比例系數(shù),,用操作端的大位移來控制從動(dòng)端的小位移,實(shí)現(xiàn)精細(xì)控制,。
- if?(sim_call_type==sim_childscriptcall_initialization)?then ?
- ????--?Check?if?the?plugin?is?loaded: ?
- ????moduleName=0 ?
- ????moduleVersion=0 ?
- ????index=0 ?
- ????pluginNotFound=true?
- ????while?moduleName?do?
- ????????moduleName,moduleVersion=simGetModuleName(index) ?
- ????????if?(moduleName=='CHAI3D')?then ?
- ????????????pluginNotFound=false?
- ????????end ?
- ????????index=index+1 ?
- ????end ?
- ?
- ????if?(pluginNotFound)?then ?
- ????????simDisplayDialog('Error','CHAI3D?plugin?was?not?found,?or?was?not?correctly?initialized?(v_repExtCHAI3D.dll).',sim_dlgstyle_ok,false,nil,{0.8,0,0,0,0,0},{0.5,0,0,1,1,1}) ?
- ????else?
- ?
- ????????--?Start?the?device: ?
- ????????local?toolRadius?=?0.001?--?the?radius?of?the?tool ?
- ????????local?workspaceRadius?=?0.2?--?the?workspace?radius ?
- ????????if?simExtCHAI3D_start(0,?toolRadius,workspaceRadius)?~=?1?then ?
- ????????????simDisplayDialog('Error','Device?failed?to?initialize.',sim_dlgstyle_ok,false,nil,{0.8,0,0,0,0,0},{0.5,0,0,1,1,1}) ?
- ????????else?
- ????????????CHAI3DPluginInitialized?=?true?
- ?
- ????????end ?
- ????end ?
- ?
- ????targetHandle?=?simGetObjectHandle('ikTarget') ?
- ?
- ????deltaPos?=?{0,?0,?0} ?
- ????counter?=?0 ?
- ????ratio?=?50 ?
- ?
- end ?
- ?
- ?
- if?(sim_call_type==sim_childscriptcall_actuation)?then ?
- ????if?buttonState?==1?then??--?press?the?button ?
- ????????local?p?=?simGetObjectPosition(targetHandle,?-1)?--?get?the?target?position ?
- ????????--?add?increment?of?the?tool?tip ?
- ????????p[1]?=?p[1]?+?deltaPos[1]?/?ratio?????????????????? ?
- ????????p[2]?=?p[2]?+?deltaPos[2]?/?ratio ?
- ????????p[3]?=?p[3]?+?deltaPos[3]?/?ratio ?
- ????????simSetObjectPosition(targetHandle,?-1,?p)??--?move?to?the?absolute?position ?
- ????end ?
- end ?
- ?
- ?
- ?
- if?(sim_call_type==sim_childscriptcall_sensing)?then ?
- ????if?CHAI3DPluginInitialized?then ?
- ????????--?Read?the?current?position?of?the?cursor: ?
- ????????local?currentToolPosition?=?simExtCHAI3D_readPosition(0) ?
- ???????? ?
- ????????--?Read?the?buttons?of?the?device: ?
- ????????buttonState?=?simExtCHAI3D_readButtons(0) ?
- ?
- ????????counter?=?counter?+?1??????--?increase?the?counter ?
- ???????? ?
- ????????if?counter?%?30?==?1?then??--?keep?the?value ?
- ????????????prevToolPosition?=?currentToolPosition ?
- ????????end ?
- ?
- ????????if?counter?%?30?==?0?then??--?calculate?tool?tip?increment ?
- ????????????deltaPos[1]?=?currentToolPosition[1]?-?prevToolPosition[1]??--?X-axis?increment ?
- ????????????deltaPos[2]?=?currentToolPosition[2]?-?prevToolPosition[2]??--?Y-axis?increment ?
- ????????????deltaPos[3]?=?currentToolPosition[3]?-?prevToolPosition[3]??--?Z-axis?increment ?
- ????????????counter?=?0??--?reset?counter ?
- ?
- ?
- ????????local?info?=?string.format("CurrentPosition:%.2f,%.2f,%.2f??DeltaPosition:%.2f,%.2f,%.2f", ?
- ????????????????????????????currentToolPosition[1],currentToolPosition[2],currentToolPosition[3], ?
- ????????????????????????????deltaPos[1],deltaPos[2],deltaPos[3]) ?
- ????????simAddStatusbarMessage(info) ?
- ?
- ????????end ?
- ?
- ????end ?
- end ?
- ?
- ?
- if?(sim_call_type==sim_childscriptcall_cleanup)?then ?
- ????if?CHAI3DPluginInitialized?then ?
- ?
- ????????--?Disconnects?all?devices?and?removes?all?objects?from?the?scene ?
- ????????simExtCHAI3D_reset() ?
- ????end ?
- end?
?
將力反饋設(shè)備手柄移動(dòng)到合適的位置之后就可以按住按鈕開始操控機(jī)器人,,松開按鈕會(huì)停止控制,。如果在VREP虛擬場(chǎng)景中添加其它物體(比如障礙物),則還可以模擬環(huán)境中的力(接觸力,、重力,、摩擦力、彈簧力等)讓操控著“感覺”到,。如果實(shí)際機(jī)器人上裝有力傳感器,,則在用Phantom omni控制機(jī)器人的同時(shí)也能讀取力的信息,反饋給操作者,。
下面是使用Phantom omni來控制機(jī)器人的動(dòng)態(tài)圖,,黃色的軌跡為使用Graph記錄的控制點(diǎn)的空間位置:

對(duì)于該機(jī)構(gòu)也可以自己實(shí)現(xiàn)運(yùn)動(dòng)學(xué)逆解的數(shù)值算法,下面給出偽逆矩陣法和阻尼最小二乘法的參考:
- import?math?? ?
- import?numpy?as?np
- ?
- #?link?length ?
- L1?=?1?? ?
- L2?=?1 ?
- ?
- gamma?=?1???????#?step?size ?
- lamda?=?0.2?????#?damping?constant?(DLS-method) ?
- stol?=?1e-3?????#?tolerance ?
- nm?=?10?????????#?initial?error ?
- count?=?0???????#?iteration?count ?
- ilimit?=?20?????#?maximum?iteration
- ?
- #?numerical?method?for?inverse?kinematics ?
- method?=?'Pseudo?Inverse'??#?'Pseudo?Inverse',?'DLS',?...
- ?
- #?initial?joint?value ?
- q?=?np.array([0,?0,?math.pi/2,?0])?#?[theta1,?d1,?theta2,?theta3]
- ?
- #?target?position?? ?
- target_pos?=?np.array([1,?0,?2])???#?[x,y,z] ?
- ?
- ?
- while?True: ?
- ????if(nm?>?stol):
- ????????#?forward?kinematics: ?
- ????????x?=?np.array([math.cos(q[0])*math.cos(q[2])*(L1+L2*math.cos(q[3]))+L2*math.sin(q[0])*math.sin(q[3]),\ ?
- ????????math.cos(q[2])*math.sin(q[0])*(L1+L2*math.cos(q[3]))-L2*math.cos(q[0])*math.sin(q[3]),\ ?
- ????????q[1]+(L1+L2*math.cos(q[3]))*math.sin(q[2])])
- ?
- ????????#?compute?error ?
- ????????error?=?target_pos?-?x
- ?
- ????????#?compute?Jacobian ?
- ????????J11?=?-math.sin(q[0])*math.cos(q[2])*(L1+L2*math.cos(q[3]))+L2*math.cos(q[0])*math.sin(q[3]) ?
- ????????J12?=?0 ?
- ????????J13?=?-math.sin(q[2])*math.cos(q[0])*(L1+L2*math.cos(q[3])) ?
- ????????J14?=?L2*(math.sin(q[0])*math.cos(q[3])-math.cos(q[0])*math.cos(q[2])*math.sin(q[3])) ?
- ????????J21?=?math.cos(q[0])*math.cos(q[2])*(L1+L2*math.cos(q[3]))+L2*math.sin(q[0])*math.sin(q[3]) ?
- ????????J22?=?0 ?
- ????????J23?=?-math.sin(q[0])*math.sin(q[2])*(L1+L2*math.cos(q[3])) ?
- ????????J24?=?-L2*(math.cos(q[0])*math.cos(q[3])+math.sin(q[0])*math.cos(q[2])*math.sin(q[3])) ?
- ????????J31?=?0 ?
- ????????J32?=?1 ?
- ????????J33?=?math.cos(q[2])*(L1+L2*math.cos(q[3])) ?
- ????????J34?=?-L2*math.sin(q[2])*math.sin(q[3]) ?
- ?
- ????????J?=?np.array([[J11,J12,J13,J14],[J21,J22,J23,J24],[J31,J32,J33,J34]]) ?
- ???????? ?
- ????????if?method?==?'Pseudo?Inverse':?
- ????????????#?Pseudo?Inverse?Method ?
- ????????????J_pseudo?=?np.dot(J.transpose(),?np.linalg.inv(J.dot(J.transpose())))?#?compute?pseudo?inverse ?
- ????????????dq?=?gamma?*?J_pseudo.dot(error) ?
- ???????????? ?
- ????????if?method?==?'DLS':
- ????????????#?Damped?Least?Squares?Method ?
- ????????????f?=?np.linalg.solve(J.dot(J.transpose())+lamda**2*np.identity(3),?error) ?
- ????????????dq?=?np.dot(J.transpose(),?f)
- ?
- ????????#?update?joint?position??? ?
- ????????q?=?q?+?dq ?
- ?
- ????????nm?=?np.linalg.norm(error) ?
- ?
- ????????count?=?count?+?1 ?
- ????????if?count?>?ilimit: ?
- ????????????print?"Solution?wouldn't?converge!"?
- ????????????break?
- ????else:
- ????????#?print?result ?
- ????????print?'theta1='?+?str(q[0]*180/math.pi)+'?d1='+str(q[1])?+?'?theta2='?+?str((q[2]-math.pi/2)*180/math.pi)+'?theta3='?+?str(q[3]*180/math.pi) ?
- ????????print?'Current?position:?%.2f,?%.2f,?%.2f'?%(x[0],x[1],x[2])???? ?
- ????????print?str(count)+'?iterations'+'??err:'+str(nm) ?
- ????????break?
?
 打印本文
打印本文 關(guān)閉窗口
關(guān)閉窗口