PHANTOM Omni設備提供簡單的控制方法
文章來源:SensAble
作者:frank
發(fā)布時間:2010年07月08日
點擊數:
次
VR4Robots?是一款高性能實時可視化的仿真工具,,可用于顯示計算機生成的3D機械模型和其它部件模型,還可以幫助用戶與模型進行互動,。該設備結合了VR4MAX?的全套虛擬現(xiàn)實工具,,具有虛擬機械驅動、虛擬環(huán)境互動以及機械操作模擬等功能,。
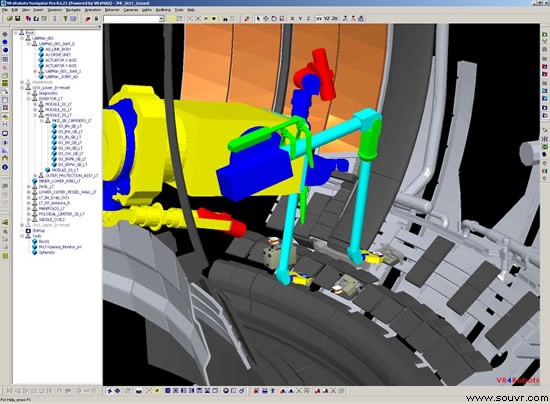
圖1. VR4Robots?顯示的機器人使用處理工具提/放瓷磚
VR4Robots ?還允許用戶通過簡單的網絡啟用模塊與真實世界連接,,并實時顯示機器人硬件設備的運行。
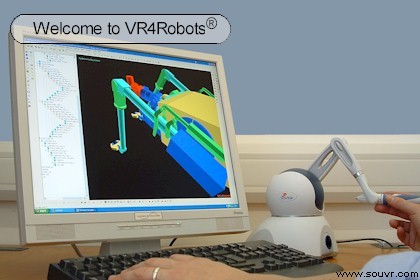
圖2. 使用PHANTOM?Omni?驅動六自由度機器人
VR4Robots?允許用戶使用鼠標,、操縱桿等不同的輸入設備對虛擬機器人進行操縱并與其互動,;尤其是VR4Robots?可以通過SensAble? OpenHaptics?工具包支持PHANTOM? Omni?觸覺設備。PHANTOM? Omni?設備提供了在虛擬環(huán)境中控制機械的簡單直觀的方法,,其力反饋功能可以幫助操縱人員更好地與環(huán)境(通過觸摸)互動并可以感覺到移動界限,。
 打印本文
打印本文 關閉窗口
關閉窗口