SensAble幫助SmartCollision復(fù)雜互動(dòng)
SmartCollision?是一款高速3D物體碰撞探測(cè)引擎,。SmartCollision?可對(duì)多邊形物體場(chǎng)景中的碰撞進(jìn)行高效探測(cè),而不只是使用場(chǎng)景的立體像素顯示,。SmartCollision?支持非凸多面體,,并可支持需要以互動(dòng)進(jìn)行多邊形模型碰撞探測(cè)的應(yīng)用。

使用SmartCollision?為您的應(yīng)用增添高效碰撞探測(cè)功能
當(dāng)兩個(gè)或多個(gè)虛擬物體相互碰撞時(shí),,根據(jù)物體的不同形狀選擇具體的算法,。根據(jù)場(chǎng)景的復(fù)雜程度,計(jì)算量可能會(huì)很大,。因此,,需要選擇高效算法和優(yōu)化方法。SmartCollision?就提供了相應(yīng)的解決方案,。
PHANTOM?觸覺(jué)設(shè)備和SmartCollision?
SensAble科技有限公司的PHANTOM?觸覺(jué)界面可與SmartCollision?一同使用,。借助SmartCollision?的觸覺(jué)(力反饋)功能,用戶可以使用觸覺(jué)對(duì)3D場(chǎng)景進(jìn)行探索,。這對(duì)于計(jì)算機(jī)輔助設(shè)計(jì),、工程及路徑規(guī)劃等應(yīng)用領(lǐng)域極為有用。觸覺(jué)極大地提高了模擬經(jīng)驗(yàn),。
SmartCollision?還具有多點(diǎn)碰撞探測(cè)功能。在其它軟件中,,觸覺(jué)碰撞探測(cè)都是通過(guò)單點(diǎn)觸覺(jué)界面模型完成,。力反饋設(shè)備則需要采用多點(diǎn)碰撞探測(cè)來(lái)進(jìn)行虛擬環(huán)境中的工具模擬,。SmartCollision?可以為您的應(yīng)用程序增添觸覺(jué)多點(diǎn)碰撞探測(cè)功能。
六自由度PHANTOM?設(shè)備和SmartCollision?
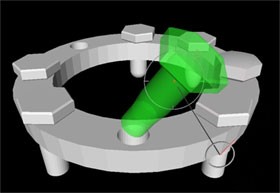
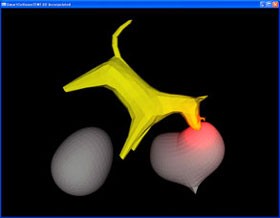
為了實(shí)現(xiàn)更加逼真的觸覺(jué)模擬,,可以使用六自由度PHANTOM?觸覺(jué)設(shè)備,。除了提供力輸出的X、Y,、Z笛卡兒坐標(biāo)值,,六自由度PHANTOM?觸覺(jué)設(shè)備還可提供力反饋方向(橫滾、俯仰和側(cè)滑等),。六自由度觸覺(jué)功能可以實(shí)現(xiàn)更真實(shí)的虛擬場(chǎng)景互動(dòng),。SmartCollision?完全支持SensAble的PHANTOM?六自由度設(shè)備,可以更加輕松地實(shí)現(xiàn)模型與虛擬場(chǎng)景之間的復(fù)雜互動(dòng),。

簡(jiǎn)單SmartCollision?應(yīng)用程序的截圖,碰撞探測(cè)庫(kù):SmartCollision?觸覺(jué)庫(kù):SensAble OpenHaptics?工具包圖形
 打印本文
打印本文 關(guān)閉窗口
關(guān)閉窗口