Force Dimension設備在機器人技術(shù)中的應用
文章來源:Force Dimension
作者:Frank
發(fā)布時間:2010年12月28日
點擊數(shù):
次
|
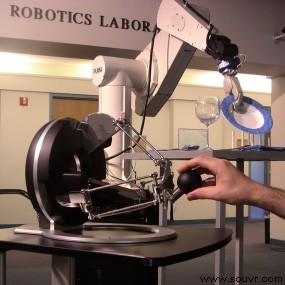
在處理有害物質(zhì)時,,最重要的一點是操作人員必須了解所操控機器人的狀態(tài)和周圍環(huán)境情況,只有這樣才能避免發(fā)生意外,,同時提高操作效率,。常用的遠程操縱方式采用視頻反饋和傳統(tǒng)的操縱桿進行控制,操作人員與現(xiàn)場之間的信息傳遞十分有限,。 使用omega.x觸覺設備,,操作人員能夠直接控制機器人,這樣不僅可以實時感應到操縱設備的反應和限制狀況(如:機器人動態(tài),、機器人工作范圍等),,還能通過感應與障礙物的碰撞來判斷周圍環(huán)境,甚至獲取觸覺引導信息,,從而降低了操作過程中的風險,。 >>相關(guān)產(chǎn)品 |
 打印本文
打印本文 關(guān)閉窗口
關(guān)閉窗口