Dragonfly2和Firefly MV攝像頭在自動車上的應(yīng)用
自動車--一種無需人干預(yù)就可以自動行駛的汽車--正在變成現(xiàn)實。正真的無人駕駛汽車可以像司機(jī)一樣“思考”,,它可以實時的做決定,,包括遵守交通法則,避免障礙物和其它車輛,,并且可以對行駛路線進(jìn)行計劃和導(dǎo)航,。

Dragonfly2和Firefly MV攝像頭在自動車上的應(yīng)用
意大利帕爾馬一所大學(xué)的分公司的VisLab的研究員,專攻汽車應(yīng)用包括環(huán)境感知和智能控制,,開發(fā)了一款BRAin-drIVE,,簡稱BRAiVE,的原型車,。這款車裝配有用于感知,,導(dǎo)航和控制的傳感器。感知系統(tǒng)以視覺為基礎(chǔ),,連同4個激光掃描器,,16束激光線,GPS,,慣性測量單元(IMU)和全X-線來自動行駛,。10個攝像頭用來探測汽車周圍的信息。及時處理的圖片和來自導(dǎo)航系統(tǒng)的信息,,為駕駛提供了必要信號,。
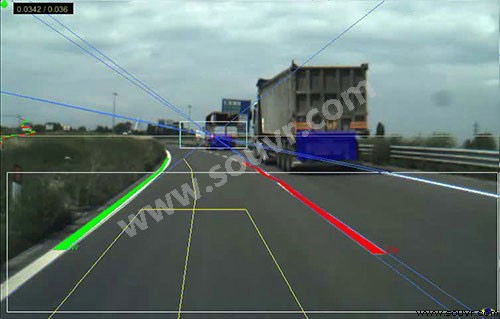
圖1 攝像頭助力前方障礙物的探測,道路交叉口預(yù)估,,停車場探測,,盲點檢測和后方障礙物的探測
4個Point Grey Dragonfly2被安裝在擋風(fēng)玻璃的下端,兩個帶有彩色傳感器,,兩個帶有單色傳感器,。這些攝像頭用于前方障礙物或車輛的探測,道路探測和交通信號的識別,。2個Dragonfly2安裝在前擋泥板上,,用于停車和交通路口的探測。另外兩個Firefly MV裝在后視鏡上,來觀察超車車輛,,剩下兩個Dragonfly2的顯示器用于檢測行駛過程中的障礙物,。
通過外部發(fā)射器或在自由模式,,根據(jù)具體情況使用Format 7 Mode 0 (有益模式區(qū)域)等方式,,獲得攝像圖片。在主板上,,攝像頭原始Bayer處理數(shù)據(jù),,以S400的速度通過FireWire接口,傳輸?shù)揭曈X系統(tǒng),。然后用立體聲算法重建3D環(huán)境,,并提供及時的環(huán)境信息。
“我們選擇使用Point Grey 攝像頭有許多原因,,其中良好的圖片質(zhì)量,,參數(shù)控制能力,如快門,,增益和自定義算法的白平衡,,超小型M12微透鏡裝置的兼容性,這些都起了重要作用,,”阿爾佩托 布羅基博士解釋道,。負(fù)責(zé)汽車集成的VisLab. 的董事,保羅補(bǔ)充道,,“在汽車后視鏡上用于集成的攝像頭的大小,,第三方軟件Linux的可用性,優(yōu)惠的價格,,良好的性能都是影響我們決定是否使用它的重要因素,。”
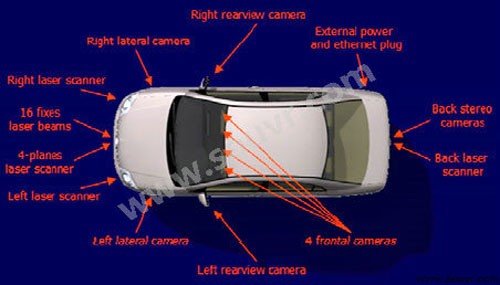
圖2 汽車上使用Dragonfly2s和Firefly MVs
BRAiVE的智能特點包括道路救助,,障礙和行人探測,,停車輔助,道路標(biāo)識探測,,路線標(biāo)記,,停車,行駛和自動巡航控制,。驅(qū)動和控制設(shè)備被很好的結(jié)合,,所有傳感器給人的感覺就像駕駛一輛普通的汽車一樣。2009年4月3日,,在意大利的帕爾馬,,BRAiVE第一次被報道。在2009年中國西安IEEE的智能車輛研討會上,BRAiVE第一次亮相,。
“人工視覺是很有前景的一項技術(shù),,它被應(yīng)用于汽車,貨車,,道路建設(shè),,礦用汽車和軍用汽車上。由于低成本和良好的性能,,視覺傳感器被廣泛應(yīng)用,。”保羅繼續(xù)說道,。他確信,,在汽車上應(yīng)用這一技術(shù),將構(gòu)成未來幾年汽車行業(yè)發(fā)展創(chuàng)新概念和全自動汽車的基礎(chǔ),。
>>相關(guān)產(chǎn)品
>>相關(guān)新聞
 打印本文
打印本文 關(guān)閉窗口
關(guān)閉窗口