::產(chǎn)品概述::
?
Quantum3D LIDAR Fusion工具套件
LIDAR Fusion工具套件為用戶提供可視化、調(diào)整,、合并,、糾正及分析LIDAR傳感器點云數(shù)據(jù)的能力,,并將點云自動轉(zhuǎn)換至標(biāo)準(zhǔn)VISSIM格式如Shape和OpenFlight?的一個多邊形合成環(huán)境數(shù)據(jù)庫中,。LIDAR Fusion工具套件產(chǎn)品由Quantum3D的子公司CG2所開發(fā),建立在NAVAIR SBIR成功商業(yè)化的基礎(chǔ)之上,,后者旨在使LIDAR傳感器數(shù)據(jù)成為VISSIM合成環(huán)境數(shù)據(jù)庫的一個新來源,。功能完善的最終產(chǎn)品有著廣泛的范圍,不僅滿足了VISSIM市場的需求,,而且還能為任務(wù)演練團(tuán)隊,、地理空間情報界(GEOINT)、傳感器開發(fā)人員及LIDAR數(shù)據(jù)提供者提供解決方案,。

LIDAR Fusion工具套件包括四個主要組成部分:
LIDAR Fusion注冊
為用戶提供了糾正每次LIDAR掃描的位置和方向錯誤的能力,。
LIDAR Fusion瀏覽器
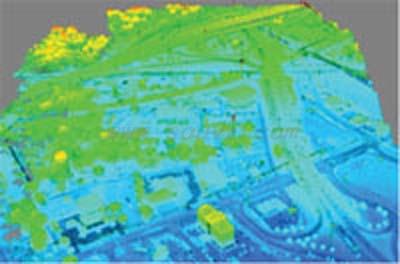
一個GUI應(yīng)用程序提供了點云數(shù)據(jù)的一個完整的3D可視化。圖像可以點數(shù)據(jù)進(jìn)行顯示,。
LIDAR Fusion注釋器
系統(tǒng)的骨干,。能夠從統(tǒng)一的點云識別并分離地形皮膚,然后將剩余點集合為特征并進(jìn)行功能分類(如建筑物)和子部分(如墻壁),。
LIDAR Fusion DBGS
采用LIDAR Fusion注釋器創(chuàng)建的數(shù)據(jù),,并將其格式化為OpenFlight?,Shapefiles和相應(yīng)的Bare Earth DEM文件,。這些數(shù)據(jù)文件中的每一份均可導(dǎo)入傳統(tǒng)的COTS DBGS工具中,,如TERREX TerraVista,以生成可在大多數(shù)圖像生成器上運行的產(chǎn)品模擬數(shù)據(jù)庫,。
應(yīng)用
LIDAR工具套件采用模塊化的設(shè)計,,使產(chǎn)品得以解決各種客戶需求:
傳感器和傳感器數(shù)據(jù)開發(fā)
點云數(shù)據(jù)可視化和編輯功能對于傳感器數(shù)據(jù)提供者和傳感器開發(fā)者(如Lockheed Martin公司的導(dǎo)彈和火控)是非常有用的,以評估新傳感器在開發(fā)中的性能,。
地理空間情報(GEOINT)
點云可視化的顯示選項和分析功能可為地理情報界提供一種快速的方法以評估來自一次原始LIDAR點云掃描中的場景,。
可視化仿真訓(xùn)練和任務(wù)演練
點云轉(zhuǎn)換到VISSIM格式為仿真、培訓(xùn)以及任務(wù)演練提供了一個新的LIDAR數(shù)據(jù)源,。能夠快速生成特定地理IG場景內(nèi)容,,傳統(tǒng)方法無法達(dá)到這一高效率。

特點與優(yōu)點
點云數(shù)據(jù)的可視化
- 加載查看多個重疊的點云數(shù)據(jù),,包含數(shù)百萬個點,,并全3D環(huán)境中以真正的交互速度查看統(tǒng)一的結(jié)果。
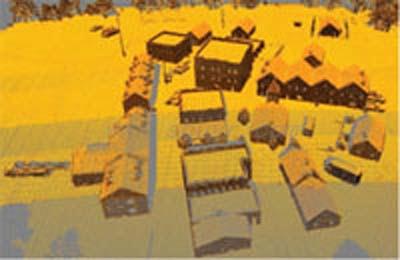
- 采用各種質(zhì)地,、顏色和底紋選項增強點云場景,。
點云編輯
- 校正點云掃描之間的地理空間定位誤差
- 使用其他特定地理信息來源如衛(wèi)星圖像對齊統(tǒng)一的點云
- 過濾錯誤的數(shù)據(jù)點
點云分析
點云數(shù)據(jù)轉(zhuǎn)換
::應(yīng)用范圍::
適用于傳感器和傳感器數(shù)據(jù)開發(fā),、地理空間情報、可視化仿真訓(xùn)練和任務(wù)演練等應(yīng)用領(lǐng)域,。
::技術(shù)特征::
::技術(shù)特征::
Quantum3D LIDAR Fusion介紹資料(中文版)
- 過程中自動識別,、隔離,并突出顯示點云內(nèi)功能,,包括地形,、建筑物和樹木。
- 過程中自動獲取點數(shù)據(jù)內(nèi)多邊形表面的位置點云數(shù)據(jù)轉(zhuǎn)換
- 將統(tǒng)一,、經(jīng)過分析后的點云數(shù)據(jù)輸出為VISSIM標(biāo)準(zhǔn)格式(OpenFlight?,,Shape,DEM)
- 這一完全自動化的轉(zhuǎn)換過程可在幾分鐘之內(nèi)采用成千上萬的特定地理信息功能生成地形,。自動過程中可以:?
·隔離地形并填充特征被清除的全部間隙?
· 構(gòu)建精確的建筑模型,,從相應(yīng)的衛(wèi)星/地區(qū)圖像應(yīng)用特定地理屋頂紋理,適用用戶 選擇的通用墻壁紋理,。?
·?將來自實際激光雷達(dá)掃描的樹木根據(jù)其現(xiàn)實位置和大小進(jìn)行規(guī)模和位置設(shè)定,。 - 導(dǎo)出的數(shù)據(jù)輸入兼容當(dāng)下多數(shù)VISSIM圖像生成器、數(shù)據(jù)庫生成編輯器,,以及DoD存檔標(biāo)準(zhǔn)(SECORE,,CDB,NPSI,,SEDRIS),。
- 采用各種質(zhì)地、顏色和底紋選項增強點云場景
- 提供可視化,、調(diào)整,、合并、糾正及分析LIDAR傳感器點云數(shù)據(jù)的能力
- 為任務(wù)演練團(tuán)隊,、地理空間情報界(GEOINT),、傳感器開發(fā)人員及LIDAR數(shù)據(jù)提供者提供解決方案。



















































練仿真系統(tǒng)")


解決方案")


實系統(tǒng)服務(wù)器系統(tǒng)")
練仿真系統(tǒng)")

圖像生成器")
圖像生成器")



解決方案")

鞲衅?></a></div>
<div id=")
據(jù)庫")


