::產(chǎn)品概述::
Noitom TrueMotion全身動(dòng)作捕捉系統(tǒng)

基于微型傳感器組成的動(dòng)作姿態(tài)捕捉系統(tǒng),該系統(tǒng)可輸出優(yōu)質(zhì)而精準(zhǔn)的的動(dòng)捕數(shù)據(jù),,在系統(tǒng)架構(gòu),、核心算法方面均具有核國際核心競爭力。

Noitom的trueMotion系統(tǒng)是三維動(dòng)畫制作,,虛擬仿真訓(xùn)練/增強(qiáng)現(xiàn)實(shí),、體育競技分析、康復(fù)醫(yī)療以及人體力學(xué)研究領(lǐng)域客戶的優(yōu)質(zhì)選擇,。
Noitom開發(fā)的動(dòng)作捕捉模塊,,不僅自身利用其進(jìn)行應(yīng)用產(chǎn)品開發(fā),并且對外提供SDK,,使更多的開發(fā)者可以在該技術(shù)平臺上以低廉的成本開發(fā)出更多,、更好的基于動(dòng)捕技術(shù)的產(chǎn)品與應(yīng)用。

技術(shù)優(yōu)勢
- 系統(tǒng)小型化,,直接將可穿戴式傳感器模塊附著于人的肢體來捕捉人體姿態(tài)
- 系統(tǒng)彈性的設(shè)計(jì)架構(gòu),,按使用需求靈活布設(shè)傳感器
- 高性能的人體運(yùn)動(dòng)恢復(fù)算法,普通PC即可運(yùn)行
- 滿足實(shí)時(shí)預(yù)覽與動(dòng)畫回放性能的平衡設(shè)計(jì)
- 可在室內(nèi)外全天候使用,,不受使用環(huán)境的限制
- 無需外部設(shè)備,,易于安裝設(shè)置,操作簡便
- 全身綁帶或緊身動(dòng)捕服穿戴方式,;系統(tǒng)準(zhǔn)備工作時(shí)間不超過10分鐘
- 數(shù)據(jù)的全無線傳輸,,信號不受遮擋影響
- 支持跳躍、奔跑,、翻騰等騰空動(dòng)作
- 支持大動(dòng)態(tài)動(dòng)作數(shù)據(jù)捕捉
- 后期制作快捷高效
- 價(jià)格低廉,,應(yīng)用空間廣闊

TrueMotion硬件
關(guān)鍵特性
- 靈活彈性的系統(tǒng)設(shè)計(jì):系統(tǒng)可設(shè)計(jì)為單臂3節(jié)點(diǎn)至全身17節(jié)點(diǎn)
- 低功耗設(shè)計(jì):可連續(xù)進(jìn)行3-5小時(shí)連續(xù)動(dòng)作捕捉
- 遠(yuǎn)距離多通道無線數(shù)據(jù)傳輸:傳輸距離戶外最遠(yuǎn)可達(dá)150米
- 無懼信號遮擋,可在動(dòng)捕服外穿著外衣,,適應(yīng)多種復(fù)雜環(huán)境
- 超小超輕的無線動(dòng)作姿態(tài)捕捉傳感器模塊:35x20x10 mm, 17克
- 高速計(jì)算及高速數(shù)據(jù)輸出,,可適應(yīng)大動(dòng)態(tài)運(yùn)動(dòng)捕捉:后臺計(jì)算達(dá)480fps

設(shè)備穿戴
- 整套系統(tǒng)設(shè)備簡單,便于攜帶
- 每個(gè)傳感器與身體的部位唯一綁定
- 完全符合人體力學(xué),、美學(xué)設(shè)計(jì)的綁帶安裝系統(tǒng),,最大程度使系統(tǒng)與人體相貼合
- 簡單易用的馬甲和緊身衣,縮短設(shè)備架設(shè)時(shí)間和復(fù)雜度

數(shù)據(jù)更新
- 所有數(shù)據(jù)均通過ISM 2.4GHz無線協(xié)議傳輸
- 支持傳感器位移和轉(zhuǎn)角數(shù)據(jù)的同時(shí)輸出
- 內(nèi)部數(shù)據(jù)更新率 480Hz
- 數(shù)據(jù)輸出幀率 48HZ,,96Hz
系統(tǒng)校準(zhǔn)
- 可視化的校準(zhǔn)界面,,簡單易用的校準(zhǔn)方式
- 支持校準(zhǔn)前導(dǎo)入人體真實(shí)的骨骼數(shù)據(jù),使模型與人1:1匹配
- 基本的校準(zhǔn)僅需演員分別做“T”,、“A”,、“S”動(dòng)作來完成初始校準(zhǔn),耗時(shí)不足1分鐘
- 多種校準(zhǔn)姿勢可選,,對應(yīng)不同的校準(zhǔn)精度
環(huán)境適應(yīng)性
- 高性能的慣性運(yùn)動(dòng)傳感器保證了精準(zhǔn)的運(yùn)動(dòng)數(shù)據(jù)捕捉
- 可在任意環(huán)境下使用(戶外陽光下,、封閉暗室內(nèi))
- 抗EM電磁干擾
MotionCapture軟件
軟件支持功能
- 對每個(gè)傳感器實(shí)時(shí)監(jiān)控(信號強(qiáng)度,,電量)
- 同時(shí)控制所有模塊的喚醒、休眠和關(guān)機(jī)
- 使用先進(jìn)的21段骨骼的人體動(dòng)力學(xué)模型
- 模型參數(shù)可跟據(jù)導(dǎo)入的演員骨骼數(shù)據(jù)調(diào)整,,滿足任何體型的動(dòng)捕需求
- 引進(jìn)世界領(lǐng)先的Ik算法,,動(dòng)作還原更細(xì)膩逼真
- 實(shí)時(shí)查看/回放/編輯/記錄動(dòng)作捕捉數(shù)據(jù)
- 實(shí)時(shí)的人體動(dòng)作還原顯示,動(dòng)作延遲不足0.01s
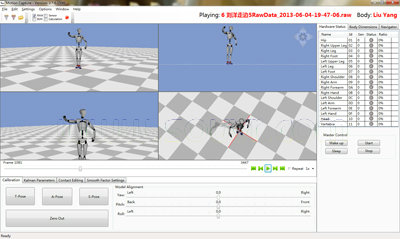
- 多窗口,、多視角的同步播放,,
- 可視化操作界面,支持動(dòng)捕數(shù)據(jù)的實(shí)時(shí)顯示/播放/編輯
- 曲線化的接觸編輯界面,,編輯結(jié)果實(shí)時(shí)高效顯示
- 可對數(shù)據(jù)進(jìn)行平滑處理,,節(jié)省后期制作時(shí)間
- 靈活的二次開放接口功能
數(shù)據(jù)輸出格式
- .BVH (Biovision Hierarchical Data)
- .FBX
- 人體運(yùn)動(dòng)的原始數(shù)據(jù)記錄文件.RAW
- 單個(gè)傳感器原始運(yùn)動(dòng)信息(陀螺儀/ 加速度/ 磁場計(jì))
- 支持多種可編程的數(shù)據(jù)輸出格式(四元數(shù),歐拉角)
動(dòng)作捕捉數(shù)據(jù)流
- 多種坐標(biāo)系格式數(shù)據(jù)輸出
- 慣性運(yùn)動(dòng)信息(加速度/轉(zhuǎn)動(dòng)速率)實(shí)時(shí)獲取
- 通過本地的TCP/IP協(xié)議傳輸,,支持遠(yuǎn)程觀看
第三方軟件支持
- Autodesk Motion Builder
- Autodesk Maya
- Autodesk 3ds Max
- Unity 3D
- Unreal Development Kit (UDK)
運(yùn)動(dòng)捕捉設(shè)備工作原理
從技術(shù)的角度來說,,運(yùn)動(dòng)捕捉的實(shí)質(zhì)就是要測量、跟蹤,、記錄物體在三維空間中的運(yùn)動(dòng)軌跡,。典型的運(yùn)動(dòng)捕捉設(shè)備一般由以下幾個(gè)部分組成:
傳感器
所謂傳感器是固定在運(yùn)動(dòng)物體特定部位的跟蹤裝置,它將向Motion capture 系統(tǒng)提供運(yùn)動(dòng)物體運(yùn)動(dòng)的位置信息,,一般會(huì)隨著捕捉的細(xì)致程度確定跟蹤器的數(shù)目,。
信號捕捉設(shè)備
這種設(shè)備會(huì)因Motion capture 系統(tǒng)的類型不同而有所區(qū)別,它們負(fù)責(zé)位置信號的捕捉,。對于慣性Motion capture系統(tǒng)來說是一塊捕捉信號的線路板,對于光學(xué)Motion capture 系統(tǒng)則是高分辨率紅外攝像機(jī),。
數(shù)據(jù)傳輸設(shè)備
Motion capture 系統(tǒng),,特別是需要實(shí)時(shí)效果的Motion capture 系統(tǒng)需要將大量的運(yùn)動(dòng)數(shù)據(jù)從信號捕捉設(shè)備快速準(zhǔn)確地傳輸?shù)接?jì)算機(jī)系統(tǒng)進(jìn)行處理,而數(shù)據(jù)傳輸設(shè)備就是用來完成此項(xiàng)工作的,。
數(shù)據(jù)處理設(shè)備
經(jīng)過Motion capture 系統(tǒng)捕捉到的數(shù)據(jù)需要修正,、處理后還要有三維模型向結(jié)合才能完成計(jì)算機(jī)動(dòng)畫制作的工作,這就需要我們應(yīng)用數(shù)據(jù)處理軟件或硬件來完成此項(xiàng)工作,。軟件也好硬件也罷它們都是借助計(jì)算機(jī)對數(shù)據(jù)高速的運(yùn)算能力來完成數(shù)據(jù)的處理,,使三維模型真正、自然地運(yùn)動(dòng)起來,。
::應(yīng)用范圍::
適用于三維動(dòng)畫制作,,虛擬仿真訓(xùn)練/增強(qiáng)現(xiàn)實(shí)、體育競技分析,、康復(fù)醫(yī)療以及人體力學(xué)研究等諸多領(lǐng)域,。
::技術(shù)特征::
- 系統(tǒng)小型化,直接將可穿戴式傳感器模塊附著于人的肢體來捕捉人體姿態(tài)
- 系統(tǒng)彈性的設(shè)計(jì)架構(gòu),,按使用需求靈活布設(shè)傳感器
- 高性能的人體運(yùn)動(dòng)恢復(fù)算法,,普通PC即可運(yùn)行
- 滿足實(shí)時(shí)預(yù)覽與動(dòng)畫回放性能的平衡設(shè)計(jì)
- 可在室內(nèi)外全天候使用,,不受使用環(huán)境的限制
- 無需外部設(shè)備,易于安裝設(shè)置,,操作簡便
- 全身綁帶或緊身動(dòng)捕服穿戴方式,;系統(tǒng)準(zhǔn)備工作時(shí)間不超過10分鐘
- 數(shù)據(jù)的全無線傳輸,信號不受遮擋影響
- 支持跳躍,、奔跑,、翻騰等騰空動(dòng)作
- 支持大動(dòng)態(tài)動(dòng)作數(shù)據(jù)捕捉
::產(chǎn)品規(guī)格::
| 規(guī)格 | Noitom TrueMotion全身動(dòng)作捕捉系統(tǒng) |
| 傳感器數(shù)目 |
| 全身動(dòng)作捕捉: | 17個(gè) |
| 上半身: | 11個(gè) |
| 下半身: | 7個(gè) |
| 單臂: | 3 個(gè) |
| 無線接收單元 |
| 主節(jié)點(diǎn): | 1個(gè) |
| 數(shù)據(jù)接口: | 無線傳輸 2.4GHz ISM |
| USB接口: | USB 1.1 (full-speed 12Mb/s) |
| Data Rate: | USB VCP baud-rate 921600bps |
| 傳輸范圍: | 室內(nèi)100m/室外150m |
| 重量 |
| TrueMotion傳感器: | 17g |
| 尺寸 |
| TrueMotion傳感器: | 35x20x10 mm |
| TrueMotion主節(jié)點(diǎn): | 75 x59x10mm |
| 單傳感器性能 |
| 動(dòng)態(tài)范圍: | ±360 deg |
| 加速度: | 80/160/24 m/s2 (± 8/ 16/ 24g) |
| 角速度: | ±2000°/sec |
| 靜態(tài)精度: | <2 deg |
| 角度分辨率: | 0.02 deg |
| 最大更新率: | 480Hz |
| 電源 |
| 傳感器充電器: | 110-240VAC/ 5VDC |
| 充電時(shí)間 : | 30分鐘 |
| 持續(xù)工作時(shí)間: | 3小時(shí) |
| 待機(jī)時(shí)間: | 30小時(shí) |
?



















































作捕捉系統(tǒng)")
作捕捉套裝")
作捕捉系統(tǒng)")
作捕捉系統(tǒng)")
作捕捉系統(tǒng)")
作捕捉系統(tǒng)")
作捕捉套裝")

