基于Virtools的維修輔助系統(tǒng)
文章來源:VR盟主官網(wǎng)
作者:SouVR
發(fā)布時(shí)間:2010年06月22日
點(diǎn)擊數(shù):
次
字號:小 大
|
|
| |
|
|
|
| |
作品名稱: |
基于Virtools的維修輔助系統(tǒng) |
|
| |
參賽單位: |
北京理工大學(xué) |
|
| |
作者名字: |
郭倩蕊 翁冬冬 王天任 孟斌 臧曉軍 黃業(yè)桃 楊濤 |
|
| |
|
|
| |
|
作品介紹
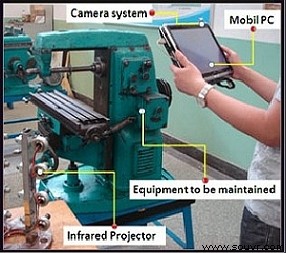
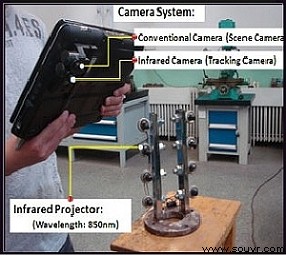
本系統(tǒng)的研究目的是突破機(jī)器感知,、圖形圖像、人機(jī)交互,、跟蹤定位等相關(guān)關(guān)鍵技術(shù),,對紅外標(biāo)志點(diǎn)的標(biāo)定方法、識別以及跟蹤注冊進(jìn)行深入分析和試驗(yàn),,開發(fā)適用于不同應(yīng)用環(huán)境條件下的精確定位和跟蹤技術(shù),,使應(yīng)用系統(tǒng)在實(shí)時(shí)性、魯棒性以及跟蹤精度等方面得到較大的改進(jìn)和完善,。為提供自然的人機(jī)交互手段,,在研究中將以基于紅外標(biāo)志點(diǎn)的維修輔助系統(tǒng)為目標(biāo),對多通道人機(jī)交互技術(shù),、便攜式計(jì)算和顯示技術(shù)等進(jìn)行深入的研究,,在理論研究的成果上構(gòu)建在較大范圍內(nèi)自由移動并與虛實(shí)結(jié)合環(huán)境進(jìn)行實(shí)時(shí)交互的維修輔助系統(tǒng)。 |


Awinda版")
Awinda版")
 Link版")
 Link版")
據(jù)手套")