熱門


作捕捉系統(tǒng)Awinda版")
作捕捉系統(tǒng)Awinda版")
作捕捉系統(tǒng) Link版")
作捕捉系統(tǒng) Link版")
據(jù)手套")
Unity AI 2021實(shí)習(xí)生應(yīng)用機(jī)器人技術(shù)應(yīng)對(duì)挑戰(zhàn)

AI@Unity正在致力于機(jī)器人,、計(jì)算機(jī)視覺和機(jī)器學(xué)習(xí)領(lǐng)域的深入研究和產(chǎn)品開發(fā)。而Unity為暑期實(shí)習(xí)生們提供的人工智能項(xiàng)目則更加具有真正的產(chǎn)品影響力,。
隨著機(jī)器人構(gòu)造與任務(wù)的越來越復(fù)雜,,機(jī)器人行業(yè)對(duì)仿真的需求也越來越大,。機(jī)器人模擬技術(shù)能夠幫助開發(fā)人員對(duì)機(jī)器人進(jìn)行擴(kuò)展,因此在他們需要測(cè)試的每個(gè)場(chǎng)景中他們并不需要真實(shí)的機(jī)器人,。另外機(jī)器人模擬技術(shù)還能夠在開發(fā)過程中開發(fā)和測(cè)試某些任務(wù),,尤其是那些在機(jī)器人完全部署之前無法執(zhí)行的任務(wù)。
Unity的機(jī)器人團(tuán)隊(duì)正專注于通過利用Unity引擎的能力,、資產(chǎn)和可集成性來進(jìn)一步推動(dòng)機(jī)器人仿真技術(shù)更加成熟,,同時(shí)構(gòu)建和擴(kuò)展具有仿真能力的機(jī)器人模擬專用工具與相關(guān)軟件包。而在Unity Robotics Hub中也提供演示,、教程和軟件包,,可以幫助用戶立即開始模擬他們自己的機(jī)器人。
2021年夏天,,Unity機(jī)器人團(tuán)隊(duì)的實(shí)習(xí)生們迎來了他們的首次工作,,這為他們?cè)?a class="insidelink" href="http://shcjtec.com/Item/69424.aspx" target="_blank" title="Unity">Unity的工作中積攢了寶貴的經(jīng)驗(yàn)。在下面的文章中我們將向大家分享他們所開發(fā)的項(xiàng)目和所獲得的一些經(jīng)驗(yàn),。
Unity中的逆運(yùn)動(dòng)學(xué)與控制
雅各布·普拉特(Jacob Platin),,賓夕法尼亞大學(xué)機(jī)器人學(xué)專業(yè)

逆運(yùn)動(dòng)學(xué)對(duì)于像READY Robotics這樣的客戶來說至關(guān)重要。
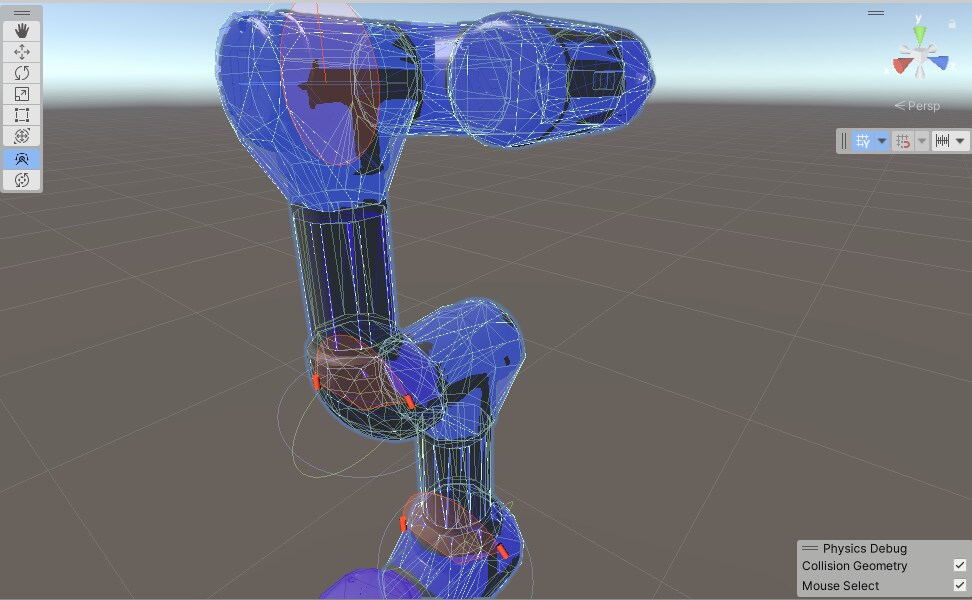
今年夏天,,我得到了一個(gè)非常難得的機(jī)會(huì)——加入到Unity機(jī)器人團(tuán)隊(duì)中來,。作為機(jī)器人團(tuán)隊(duì)的一員,將反向運(yùn)動(dòng)學(xué)和機(jī)器人控制器集成到Unity中成為了我們首個(gè)項(xiàng)目,。當(dāng)用戶需要模擬機(jī)器人,,尤其是機(jī)械臂時(shí),他們需要使用并控制與真實(shí)機(jī)器人相同或相似的API來控制機(jī)器人,。這些應(yīng)用編程接口被稱為機(jī)器人控制器,,它們提供了各種功能,包括將機(jī)器人從一個(gè)位置移動(dòng)到另一個(gè)位置,,移動(dòng)單個(gè)關(guān)節(jié)(在關(guān)節(jié)空間中),,甚至移動(dòng)機(jī)器人轉(zhuǎn)一圈等,。機(jī)器人控制器主要控制節(jié)空間工作,,我們可以發(fā)送給每個(gè)關(guān)節(jié)執(zhí)行目標(biāo)角度的命令。然而,,人們只關(guān)心末端執(zhí)行器在笛卡爾空間中的位置和方向(即,,我們的3D世界中的X、Y和Z坐標(biāo)),。因此,,反向運(yùn)動(dòng)學(xué)的目標(biāo)是確定笛卡爾空間中給定位置和方向?qū)?yīng)的關(guān)節(jié)角度。反向運(yùn)動(dòng)學(xué)是機(jī)器人專家工具包中至關(guān)重要的一部分,,因此這個(gè)包使Unity作為機(jī)器人仿真平臺(tái)更有權(quán)威,,也更容易使用,。
事實(shí)證明,在Unity中集成這些功能是一個(gè)巨大的挑戰(zhàn),,要求我復(fù)習(xí)線性代數(shù),、物理、微積分,、計(jì)算機(jī)科學(xué),,甚至微積分這些前的知識(shí),同時(shí)以最用戶友好的方式設(shè)計(jì)軟件,。我還通過創(chuàng)建項(xiàng)目演示學(xué)習(xí)了如何在虛擬現(xiàn)實(shí)中模擬工業(yè)機(jī)器人,,在這個(gè)演示中,用戶可以在虛擬現(xiàn)實(shí)中移動(dòng)一個(gè)由機(jī)器人手臂跟隨的立方體,。然而,,伴隨著挑戰(zhàn)而來的是巨大的機(jī)遇,有效地獨(dú)自設(shè)計(jì),、構(gòu)建和運(yùn)輸這樣基本的代碼來支持Unity中的機(jī)器人給我們帶來了全新的可能性,。令人難以置信的是,人們很少發(fā)現(xiàn)自己每天都在期待工作,,并不斷受工作中的挑戰(zhàn),,我很幸運(yùn)地說,我在Unity找到了這種體驗(yàn),!
多智能體機(jī)器人仿真
蒂芬妮·尤(Tiffany Yau),,多倫多大學(xué)機(jī)器人工程學(xué)士
西蒙·查莫羅(Simon Chamorro),舍布魯克大學(xué)機(jī)器人工程學(xué)士

在工業(yè)應(yīng)用中,,具有不同專業(yè)能力的多個(gè)機(jī)器人必須協(xié)同工作來執(zhí)行復(fù)雜的任務(wù),。該項(xiàng)目展示了如何通過Unity編輯器和機(jī)器人仿真包以及ROS 2實(shí)現(xiàn)多個(gè)機(jī)器人之間的協(xié)調(diào),以在倉庫中執(zhí)行查找和轉(zhuǎn)移任務(wù),。該演示還強(qiáng)調(diào)了使用Unity相對(duì)于其他機(jī)器人仿真工具的優(yōu)勢(shì),,在其他工具中,像這樣的多智能體仿真很難完成,。我們的模擬由兩種類型的機(jī)器人組成,,我們稱之為Findbot和Ferrybot。多個(gè)Findbots負(fù)責(zé)使用機(jī)器學(xué)習(xí)在倉庫環(huán)境中查找目標(biāo)多維數(shù)據(jù)集,,單個(gè)Ferrybot導(dǎo)航,、拾取并在指定位置放下這些多維數(shù)據(jù)集。為了實(shí)現(xiàn)這一點(diǎn),,每個(gè)Findbot都配備了一個(gè)攝像頭來檢測(cè)立方體,,而Ferrybot則有一個(gè)機(jī)械臂來拾取立方體。這個(gè)示例項(xiàng)目對(duì)于希望在自己的模擬中使用Unity機(jī)器人工具的機(jī)器人開發(fā)人員和研究人員來說非常有用,。
總的來說,,這是一次很好的體驗(yàn),,因?yàn)槲覀兡軌蛟谖覀兊捻?xiàng)目中使用和集成大量的Unity軟件包。例如,,我們使用了計(jì)算機(jī)視覺感知包用于數(shù)據(jù)收集以訓(xùn)練我們的姿態(tài)預(yù)估模型,。我們還在費(fèi)里波特上使用了一個(gè)反向運(yùn)動(dòng)學(xué)包(在上面雅各布的項(xiàng)目中提到過)來拾取立方體。這對(duì)于我們來說也是學(xué)習(xí)協(xié)作和溝通的絕佳機(jī)會(huì),。
電話:010-50951355 傳真:010-50951352 郵箱:[email protected] ,;點(diǎn)擊查看區(qū)域負(fù)責(zé)人電話
手機(jī):13811546370 / 13720091697 / 13720096040 / 13811548270 /
13811981522 / 18600440988 /13810279720 /13581546145

