熱門


作捕捉系統(tǒng)Awinda版")
作捕捉系統(tǒng)Awinda版")
作捕捉系統(tǒng) Link版")
作捕捉系統(tǒng) Link版")
據(jù)手套")
器物3D影像建置流程
器物3D影像建置流程


1. 前言
國立故宮博物院為更完整呈現(xiàn)與保存本院文物之全貌及精致特性與開創(chuàng)未來加值應(yīng)用之機(jī)會,,自92 年起建置3D 數(shù)字?jǐn)z影系統(tǒng),,針對毛公鼎、轉(zhuǎn)心瓶,、雕橄欖核小舟,、翠玉白菜及象牙球等五項(xiàng)精美文物進(jìn)行3D 影像的拍攝,以期讓大眾以多元的方式認(rèn)識故宮精美之文物,。以下針對本院目前器物3D 影像建置的流程做一說明:
2. 3D立體環(huán)物設(shè)備初始化
使用3D 環(huán)物攝影系統(tǒng)組件主要有相機(jī)旋臂控制裝置(控制器物旋轉(zhuǎn)裝置及垂直相機(jī)旋臂之轉(zhuǎn)動(dòng)),、器物旋轉(zhuǎn)裝置(負(fù)責(zé)360 度水平旋轉(zhuǎn)器物角度)、垂直及水平相機(jī)旋臂(相機(jī)旋臂控制裝置控制垂直相機(jī)旋臂,,帶動(dòng)水平旋臂上下之移動(dòng)以進(jìn)行拍攝),、相機(jī)(負(fù)責(zé)擷取器物影像)、相機(jī)云臺(連結(jié)相機(jī)與相機(jī)水平旋臂,,固定及調(diào)整相機(jī)角度之用),、個(gè)人計(jì)算機(jī)及影像控制與合成軟件。
3D 立體環(huán)物設(shè)備中的任一組件初始化安裝角度的控制均會影響下一組件,,進(jìn)而影響到拍攝的角度,;拍攝角度不精確將直接影響到最后影像合成的3D 成效,故于每一個(gè)組件安裝時(shí)皆必須使用垂直水平儀測量并仔細(xì)校對相關(guān)角度,。茲將3D 立體環(huán)物設(shè)備組件的初始安裝步驟與相關(guān)校對條列說明于下:
1. 相機(jī)旋臂控制裝置聯(lián)機(jī):安裝相機(jī)旋臂控制裝置之電源線,,并利用數(shù)據(jù)傳輸線(RS-232) 鏈接計(jì)算機(jī)及相機(jī)旋臂控制裝置,進(jìn)而使用計(jì)算機(jī)軟件 (Object Master) 來下達(dá)指令予相機(jī)旋臂控制裝置,,達(dá)到設(shè)定或調(diào)整器物旋轉(zhuǎn)裝置及垂直相機(jī)旋臂之轉(zhuǎn)動(dòng)之目的,。
2. 垂直旋臂接頭校對:利用計(jì)算機(jī)軟件 (Object Master)及垂直水平儀來初始旋臂接頭如圖一所示,為確保拍攝時(shí)能精確的擷取不同角度的器物影像,,故一開始的旋臂架設(shè),,甚至于旋臂接頭皆必須利用垂直水平儀測量角度,必要時(shí)利用計(jì)算機(jī)軟件(Object Master)來加以校正,,以確保架設(shè)垂直旋臂前旋臂接頭為垂直狀態(tài),。
圖一、初始旋臂接頭
3. 垂直相機(jī)旋臂架設(shè)及校對:預(yù)先取得器物尺寸等相關(guān)數(shù)據(jù),,視拍攝器物大小選擇適當(dāng)?shù)拇怪毙?,依器物大小決定安裝的位置,,并利用U 型環(huán)將其初步固定,如圖二所示:

圖二,、初始垂直旋臂
接著,,利用計(jì)算機(jī)軟件 (Object Master) 將垂直相機(jī)旋臂調(diào)整至水平,使用垂直水平儀,,測量垂直旋臂上水平旋臂固定接頭,,如下圖三及圖四,必要時(shí)松開U 型環(huán)轉(zhuǎn)動(dòng)垂直旋臂,,確保此時(shí)之垂直旋臂上的水平旋臂固定接頭為水平,,而后確實(shí)固定垂直旋臂U 型環(huán)。

圖三,、圖四 初始垂直旋臂上的水平旋臂固定接頭
4. 水平相機(jī)旋臂架設(shè)及校對:將水平相機(jī)旋臂保持水平且視拍攝器物大小決定固定于垂直旋臂上的水平旋臂固定接頭的位置,,固定水平旋臂,固定后再次利用垂直水平儀測量水平相機(jī)旋臂角度,,確保水平旋臂水平固定于垂直旋臂之水平旋臂固定接頭上,,如圖五及圖六所示。
 ?
?圖五,、圖六 確保水平旋臂水平固定于垂直旋臂之水平旋臂固定接頭上
5. 器物旋轉(zhuǎn)裝置架設(shè):依拍攝器物大小選用適當(dāng)?shù)霓D(zhuǎn)盤,,并連接傳輸控制線至相機(jī)旋臂控制裝置,且器物旋轉(zhuǎn)裝置之轉(zhuǎn)盤中心點(diǎn)位置必須與垂直旋臂接頭中心成ㄧ水平線,。
6. 相機(jī)云臺架設(shè)及校對:云臺架設(shè)位置與器物旋轉(zhuǎn)裝置之轉(zhuǎn)盤中心點(diǎn)位置及垂直相機(jī)旋臂接頭中心必須成90 度,。相機(jī)架設(shè)相機(jī)云臺于水平旋臂之上,并利用相機(jī)云臺上水平(控制云臺之水平角度)及垂直控制螺絲(待與相機(jī)相接后可用于調(diào)整相機(jī)垂直之角度)控制云臺之水平及垂直之角度,。云臺架設(shè)時(shí)須保持水平,,亦即必須利用垂直水平儀測量水平云臺架設(shè)時(shí)水平之角度,而后才固定云臺水平控制螺絲,,垂直控制可待與相機(jī)相接后一并調(diào)整,。
7. 相機(jī)架設(shè)及校對:我們采用的相機(jī)為Nikon D100,由于相機(jī)架設(shè)于云臺上后會產(chǎn)生一個(gè)約10 度垂直的角度,,而之前水平旋臂及云臺裝設(shè)時(shí)都是以水平0 度為基準(zhǔn),,故為了校對固定于相機(jī)云臺之相機(jī)鏡頭的垂直角度,必須利用計(jì)算機(jī)軟件 (Object Master) 將水平旋臂往下放10 度(之后將以垂直-10~80 度所示進(jìn)行拍攝,,若將相機(jī)角度加上可正好拍攝0~90 度的影像),,如圖七之示意圖。

圖七,、 相機(jī)及拍攝角度示意圖
而后利用固定于相機(jī)上之垂直水平儀及云臺上垂直控制螺絲調(diào)整相機(jī)的垂直的角度,,此時(shí)相機(jī)必須處于水平0 度且垂直的狀況,即同如圖八及圖九所示,。

圖八,、圖九 確保相機(jī)處于水平且垂直的狀況
3. 器物擺設(shè)及試拍
1. 中心點(diǎn)定位及試拍相機(jī):3D 立體環(huán)物設(shè)備初始化時(shí)相機(jī)云臺位置與器物旋轉(zhuǎn)裝置之轉(zhuǎn)盤中心點(diǎn)及垂直相機(jī)旋臂接頭中心必須成90 度(此為未架設(shè)相機(jī)時(shí)的初步環(huán)境設(shè)定),,若各組件于架設(shè)時(shí)均已精確的掌控角度的控制,此時(shí)架設(shè)相機(jī)以旋臂垂直80 度角進(jìn)行試拍轉(zhuǎn)盤中心點(diǎn)(加上相機(jī)角度10 度正好為90 度),,轉(zhuǎn)盤中心點(diǎn)必定落于計(jì)算機(jī)軟件 (Object Master)的影像顯示區(qū)正中央,,如圖十所示,,亦即此時(shí)相機(jī)鏡頭中心,、轉(zhuǎn)盤中心及垂直旋臂接頭中心三點(diǎn)形成一直角三角形。若非如圖十一所示,,則必須細(xì)部調(diào)整移動(dòng)器物旋轉(zhuǎn)裝置,,使試拍后的轉(zhuǎn)盤中心點(diǎn)落于影像顯示區(qū)中的正中央。

圖十,、轉(zhuǎn)盤中心定位???????????????????????????????????????????????? ?????? 圖十一,、轉(zhuǎn)盤中心未定位
2. 器物旋轉(zhuǎn)裝置高度調(diào)整:擺放器物于物旋轉(zhuǎn)裝置上,利用器物旋轉(zhuǎn)裝置下端的油壓裝置加以調(diào)整高度,,同時(shí)以相機(jī)水平試拍,,使器物的成像上下端位于鏡頭的上下邊緣中心,亦即成像位于計(jì)算機(jī)軟件相關(guān)參考線的上下中心,。
3. 器物微調(diào):待旋轉(zhuǎn)裝置高度調(diào)整后,,調(diào)整器物中心放置于旋轉(zhuǎn)盤底部中心,并以相機(jī)垂直試拍,,同時(shí)利用計(jì)算機(jī)軟件之參考線加以微調(diào)器物擺設(shè)位置,,使器物位于鏡頭中心,如圖十二及圖十三所示,。

圖十二,、圖十三 器物微調(diào)
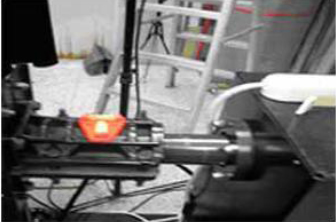
4. 燈光設(shè)定與拍攝:垂直旋臂設(shè)定為80 度,并擺設(shè)現(xiàn)場燈光,,如圖十四所示,,同時(shí)試拍,待現(xiàn)場燈光師及攝影師確認(rèn)現(xiàn)場燈光及影像于計(jì)算機(jī)畫面上呈現(xiàn)皆達(dá)一定水平后,,便可進(jìn)行第一階段的拍攝,。利用軟件設(shè)定自動(dòng)拍攝的角度,由垂直旋臂80 度開始進(jìn)行第一階段的拍攝,,配合器物旋轉(zhuǎn)裝置360 度拍攝,,設(shè)定每10 度拍攝一張。垂直角度將由80 度以每10 度為一個(gè)階段的方式向下進(jìn)行直到-10 度,,每一個(gè)階段間皆會視狀況及光線的連續(xù)性及反射性適時(shí)的調(diào)整打光的方式,,進(jìn)行一個(gè)階段后便會暫停,待現(xiàn)場燈光師及攝影師確認(rèn)燈光及影像后繼續(xù)拍攝,。
圖十四,、燈光設(shè)定
4. 正式拍攝
利用計(jì)算機(jī)軟件控制拍攝的角度,,并配合現(xiàn)場燈光的適度調(diào)整,進(jìn)行垂直80 ~-10 度(計(jì)10 個(gè)角度)及水平360 度(每10 度一張,,計(jì)36 張),,總計(jì)一個(gè)器物將產(chǎn)生360 張的正拍影像,且視需求拍攝局部特寫影像,。
5. 偏移拍攝
為了能呈現(xiàn)出3D 立體的特殊影像,,除了依設(shè)定的角度進(jìn)行正拍器物外,還必需水平偏移相機(jī)位置進(jìn)行偏移拍攝,。產(chǎn)生各360 張具有視差效果的左右影像,,且利用影像軟件 (JPS Builder) 合成左右眼影像進(jìn)而產(chǎn)生立體影像,之后利用3D播放軟件及搭配3D立體眼鏡或直接以裸視特殊屏幕即一種可將左右眼所接受視線個(gè)別獨(dú)立分離的視差屏幕 (Parallax Barrier) ,,便可看到「浮出」屏幕之外3D視覺效果,。故我們于正拍完器物的所有角度后,便直接采原始正拍角度設(shè)定值接續(xù)進(jìn)行單機(jī)偏移拍攝,,偏移的方式為直接于水平相機(jī)旋臂上水平偏移云臺及相機(jī)位置約7cm~10cm,。
6. 影像合成
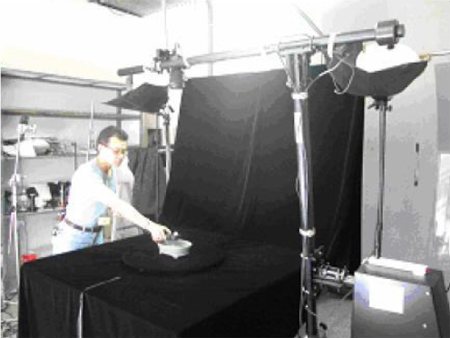
以相機(jī)所拍攝的器物左右影像以影像軟件 (JPS Builder) 加以合成JPS 立體圖像文件,如下圖十五到十七所示,,且當(dāng)使用者要觀賞 3D 影像時(shí),,便透過JPS Viewer 來播放,同時(shí)配合3D 立體眼鏡來呈現(xiàn)立體的器物影像,。
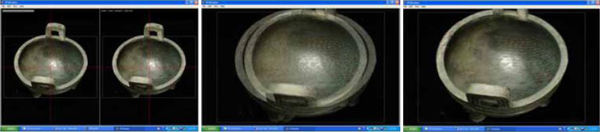 ?
?圖十五,、器物之左右影像???????????????????????????圖十六、左右影像合成?????????????????????? 圖十七,、合成后的3D影像
電話:010-50951355 傳真:010-50951352 郵箱:[email protected] ,;點(diǎn)擊查看區(qū)域負(fù)責(zé)人電話
手機(jī):13811546370 / 13720091697 / 13720096040 / 13811548270 /
13811981522 / 18600440988 /13810279720 /13581546145

