::產(chǎn)品概述::
人機工程學是一門多學科的交叉學科,,研究的核心問題是人、機器及環(huán)境三者間的協(xié)調(diào),,使得在效率,、安全、健康,、舒適等幾個方面的特性得以提高,。隨著科技、經(jīng)濟以及制造業(yè)產(chǎn)業(yè)的不斷升級和發(fā)展,,人機工程學的應用越來越受到重視,。
高校作為技術(shù)人才的輸出單位,應該立足于目前國內(nèi)人機工程理論和應用發(fā)展水平,充分培養(yǎng)學生的人機工程理論水平和實踐操作能力,,使其在學校學習的內(nèi)容能夠與社會單位的軟件資源及設備進行對接,,提升學生的就業(yè)率和適應社會和工作的能力。
然而,,目前國內(nèi)的人機工程教學實驗室都是以各種硬件實驗設備為主,,缺乏適用的針對人機工程教學實踐的軟件,。
軟件特點
●提供精確的數(shù)字人體模型,,內(nèi)置多種姿態(tài)庫。
●支持多種CAD格式模型快速,、方便導入,。
●支持VRPN(通用虛擬現(xiàn)實通信協(xié)議),支持市場上主流的虛擬現(xiàn)實外設,,包括全身動作捕捉系統(tǒng),、數(shù)據(jù)手套、數(shù)據(jù)頭盔等,。
●具備強大的人機工程仿真分析功能,,包括可視性分析、可達性分析,、舒適度分析,,作業(yè)強度分析、作業(yè)時間分析,、疲勞度分析,、作業(yè)方式分析等功能。
軟件介紹
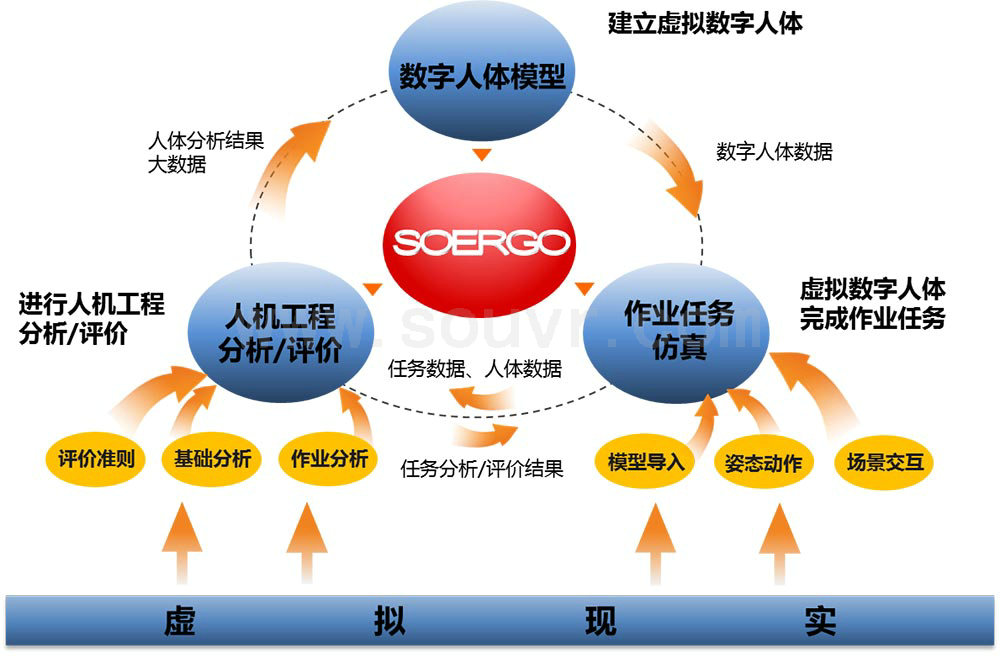
SoErgo v1.0是一款滿足上述高校對于人機工程教學實踐應用需求的仿真分析軟件,,是集數(shù)字人體建模,、作業(yè)任務仿真與人機工程分析于一體的軟件解決方案。
使用SoErgo可以在虛擬環(huán)境中定義精確的數(shù)字人體,,完成作業(yè)任務并利用人機工程分析工具來分析任務績效和人的表現(xiàn),。SoErgo內(nèi)置了可視性分析、可達性分析等主觀分析工具,,還有采用RULA準則和REBA準則的舒適度分析工具,;針對作業(yè)任務,可進行作業(yè)強度,、作業(yè)時間等分析,。
建立數(shù)字人體

SoErgo提供精確的數(shù)字人體模型,該人體模型:
●包含不少于50個關(guān)節(jié),,不少于90個自由度,;
●可以選擇不同百分位數(shù)的人體;
●可自定義姿態(tài)和手勢,。
建虛擬場景
SoErgo支持.fbx, .obj, .3ds, .ive等多種CAD格式,,可以直接導入CAD模型,,創(chuàng)建虛擬仿真場景。

調(diào)整人體姿態(tài)
可以從SoErgo內(nèi)置的常用姿態(tài)庫中選擇姿態(tài),,也可以通過調(diào)整數(shù)字人體的頭,、肩膀、脊柱,、手臂,、腿、腳等關(guān)節(jié),,改變他們的角度從而調(diào)整姿態(tài),。
同樣,可以通過SoErgo內(nèi)置的常用手勢庫中選擇手勢,,也可以通過改變手部關(guān)節(jié)角度來調(diào)整手勢,。

指定作業(yè)任務
SoErgo允許您創(chuàng)建基于時間軸的人體關(guān)鍵幀動畫以及物體關(guān)鍵幀動畫,在動畫中數(shù)字人可以進行多個作業(yè)任務的仿真,。

人機工程分析
可視性分析
可視性分析解決“看得到”問題,。具體來講是指從一個或多個位置所能看到的范圍或可見程度。

可達性分析
可達性分析解決“夠得到”問題,。在進行可達性分析時,,主要是依據(jù)相關(guān)人體測量數(shù)據(jù)來判斷操作者需要操作的控制器是否在合理的范圍內(nèi)。

舒適度分析
采用RULA或REBA等準則進行人體關(guān)節(jié)打分,,從而分析人體靜態(tài)姿態(tài)的舒適度,。

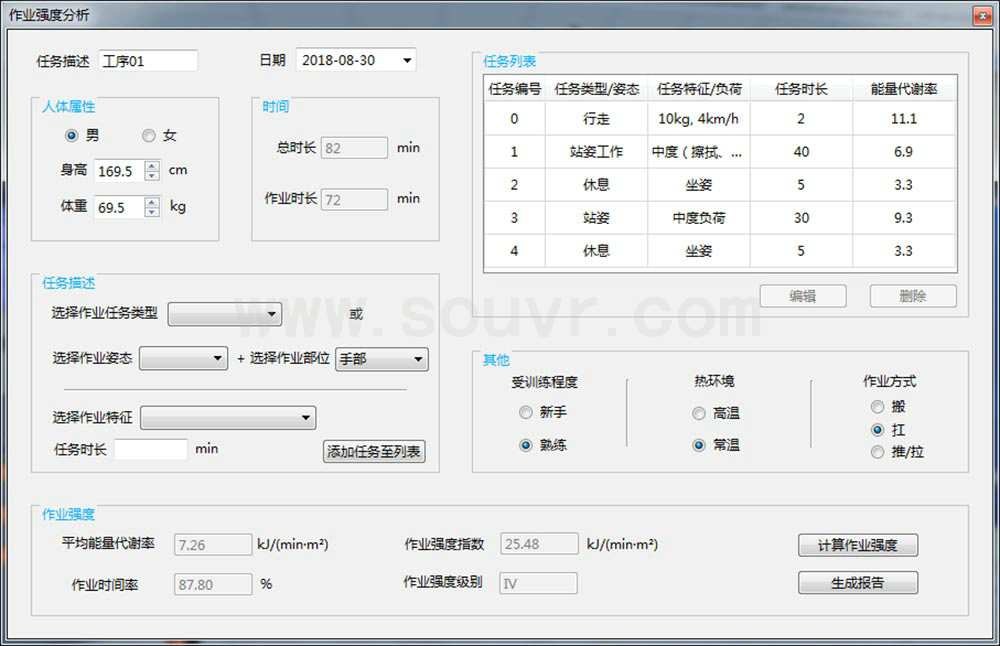
作業(yè)強度分析
作業(yè)強度可以定義為在單位時間內(nèi),操作者為完成規(guī)定作業(yè)任務所承受的體力工作量大小,。采用我國于1997年改進的體力勞動強度分級標準《GB 3869-1997》,,來進行作業(yè)強度的分析。
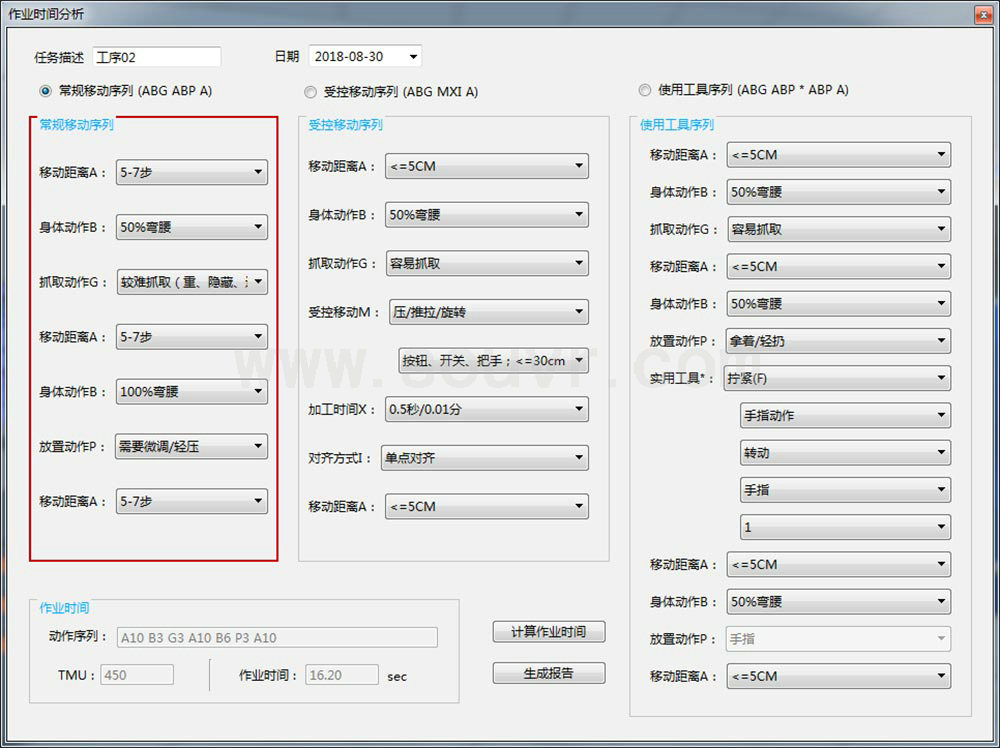
作業(yè)時間分析
作業(yè)時間分析是通過將作業(yè)內(nèi)容分解成基本動作單元序列再累加實現(xiàn)的,。
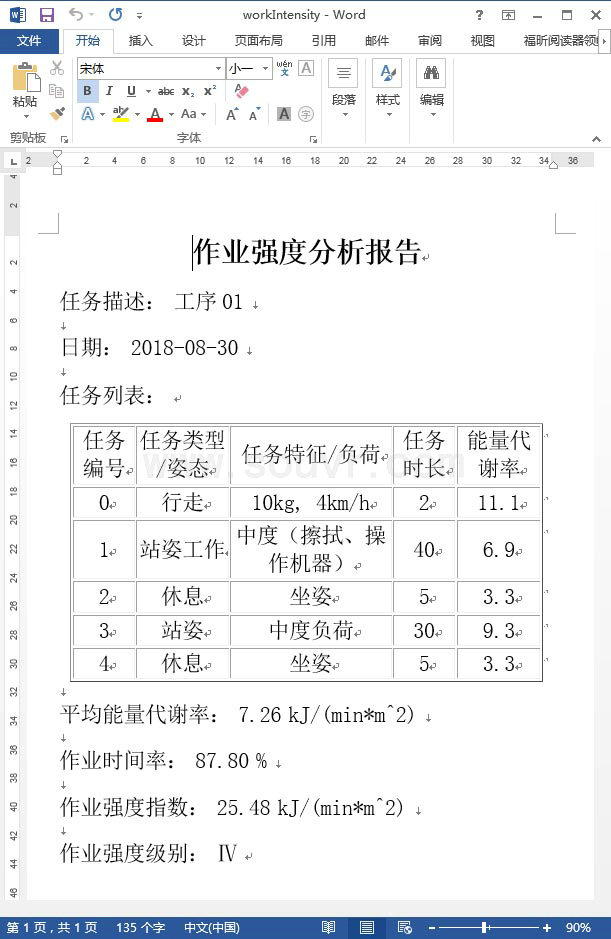
分析報告
舒適度分析,、作業(yè)強度分析、作業(yè)時間分析等可量化的分析功能,,分析結(jié)果均可生成word版分析報告,。
軟件配置
序號 | 功能 | 描述 |
1 | 基本功能 | 文件管理、視圖操作,、屬性管理,、結(jié)構(gòu)樹管理、燈光管理等,; |
2 | 數(shù)據(jù)導入 | 支持導入.fbx, .obj, .3ds, .ive等多種CAD格式,; |
3 | 數(shù)字人體及控制 | 創(chuàng)建數(shù)字人體并實現(xiàn)人體關(guān)節(jié)、姿態(tài)控制; |
4 | 動畫編輯 | 創(chuàng)建人體,、物體和攝像機的關(guān)鍵幀動畫,; |
5 | 可視性分析 | 生成數(shù)字人體視錐和視角,驗證可視性,。 |
6 | 可達性分析 | 生成數(shù)字人體可達范圍包絡面,,驗證可達性。 |
7 | 舒適度分析 | 利用RULA和REBA準則對數(shù)字人體執(zhí)行不同任務時采用的作業(yè)姿態(tài)進行舒適度分析,。 |
8 | 作業(yè)強度分析 | 分析為完成某項作業(yè)任務所承受的體力作業(yè)強度,; |
9 | 作業(yè)時間分析 | 將某項作業(yè)任務分解成作業(yè)單元序列,從而進行作業(yè)時間分析,; |
軟件以package的方式進行銷售,,每10個license為一個package,可安裝在10臺電腦上,。如果需要接入虛擬現(xiàn)實外設,如數(shù)據(jù)頭盔,,數(shù)據(jù)手套,,動捕系統(tǒng),立體顯示系統(tǒng)等設備我們還提供完備的“VR+人機”解決方案,。
應用案例
某客戶需求
目標
幫助完成教學組織及學生實訓演練,。讓學生能夠理解人機工程仿真分析的過程和操作,并且自己動手完成某個產(chǎn)品/任務的人機工程分析流程,。 通過此次實驗室的軟件升級,,結(jié)合已有的硬件可以用于學校相關(guān)科研課題的論證。
產(chǎn)品提供
針對以上客戶需求,,結(jié)合客戶現(xiàn)有技術(shù)設備(圖形工作站,、虛擬現(xiàn)實數(shù)據(jù)頭盔、慣性動作捕捉系統(tǒng)等),,我們?yōu)榭蛻舭惭bSoergo V1.0軟件,,并為客戶提供相關(guān)的產(chǎn)品培訓。
客戶評價
經(jīng)一年來的使用,,客戶對該軟件評價如下:
●教學內(nèi)容和演示在投影顯示系統(tǒng)中可隨時切換,,方便老師理論授課和實操演練講解;
●更好地輔助學生理解人機工程學的知識點以及仿真應用,;
●幫助學生進行產(chǎn)品的人機工程分析,,熟悉分析流程,掌握分析方法,;
●設計場景/設備操作實施流程展示很方便,。
?“人機工程仿真實驗室的建立,不但提升了我校人機工程的專業(yè)建設,提高了課程的教學成果,,同時增強了學生們的動手能力以及對于新硬件,、新技術(shù)的使用和熟悉,對他們畢業(yè)以后的就業(yè)也很有很大幫助,?!?/p>
::應用領(lǐng)域::
航空航天、兵器,、汽車,、軌道交通、能源,、核電等行業(yè)
?
::解決方案::
?虛擬現(xiàn)實教育解決方案
?
》點擊查看更多












































實仿真軟件(教育版)")

實仿真平臺")
維修性設計分析與驗證評估工具")
字樣機協(xié)同評審工具")
維修性設計分析與驗證評估工具")
字樣機協(xié)同評審工具")
實仿真平臺")
實仿真軟件(教育版)")

