::產(chǎn)品概述::
QUARC實時控制軟件
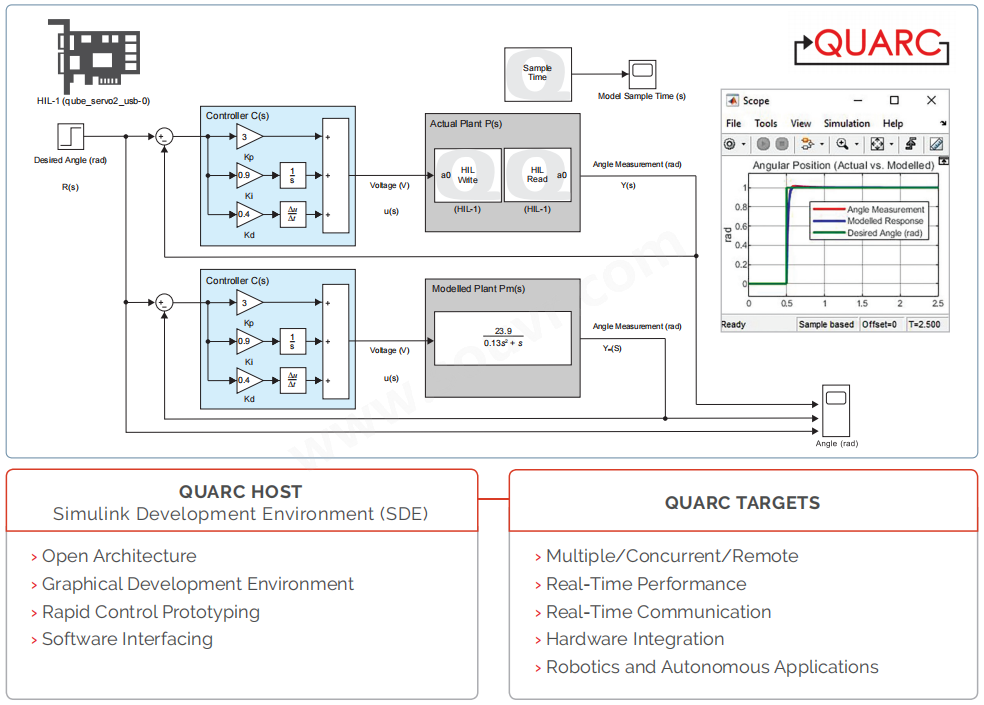
QUARC?是使用Simulink?在硬件上設(shè)計,,開發(fā),部署和驗證實時應(yīng)用程序的有效方法,。QUARC直接從Simulink設(shè)計的控制器中生成實時代碼,,并在Windows目標(biāo)上實時運行無需進行數(shù)字信號處理或編寫一行代碼。
概述
QUARC幫助教育工作者彌合理論模型與現(xiàn)實世界之間的鴻溝,。借助QUARC,,他們無需擔(dān)心與硬件的接口或確定性的性能。使用直觀的Simulink圖形界面,,他們可以使學(xué)生對復(fù)雜系統(tǒng)的設(shè)計有系統(tǒng)的了解,,并讓他們進行實時交互。對于研究人員而言,,QUARC使開發(fā)算法快速而可靠,。借助用于控制,通信,,圖像處理等的廣泛的跨平臺,,研究級庫,他們只需按一下按鈕,,就可以將其算法部署到各種本地和遠程平臺,。
許可選項

QUARC基礎(chǔ)
提供完整的Quanser教學(xué)產(chǎn)品和課程資源
支持使用外部模式的Simulink圖形開發(fā)環(huán)境,以在Windows中啟用實時執(zhí)行,,參數(shù)調(diào)整和數(shù)據(jù)監(jiān)視
Quanser硬件在環(huán)(HIL)API,,可快速輕松地訪問各種硬件設(shè)備,從數(shù)據(jù)采集卡和攝像機到用戶界面設(shè)備(包括操縱桿和觸覺棒)
直接連接到各種FLIR攝像機以進行圖像處理
豐富的廣泛的實用程序庫,,用于快速控制原型
支持NI myRIO和NI ELVIS III嵌入式平臺

QUARC集成
QUARC Essentials的所有功能
實時持久性和確定性通信
支持使用TCP / IP,,UDP,共享內(nèi)存,,串行,,SPI,I2C的數(shù)據(jù)I / O
通信的執(zhí)行選項包括同步/異步,,阻塞和非阻塞

QUARC自研
QUARC集成的所有功能
支持自主系統(tǒng),,包括QuanserQBot 2e移動機器人和QDrone四旋翼無人機飛機
直接從NaturalPointOptiTrack和Vicon攝像機系統(tǒng)訪問本地化數(shù)據(jù)
動態(tài)重新配置代碼以提供靈活的操作模式
針對自動駕駛汽車的優(yōu)化應(yīng)用程序庫,包括參考幀操作,,圖像處理以及視頻壓縮和傳輸

QUARC機器人技術(shù)
QUARC集成的所有功能
對Quanser關(guān)節(jié)控制機器人和觸覺設(shè)備的硬件支持
使用3D Systems Phantom和Force Dimension觸覺設(shè)備與您的軟件進行交互
針對機器人的優(yōu)化應(yīng)用程序庫,,包括參考框架操作,
運動學(xué),,圖像處理以及視頻壓縮和傳輸