::產(chǎn)品概述::
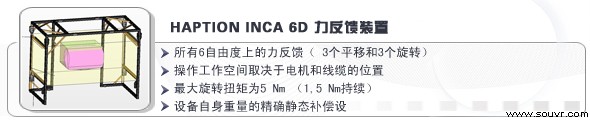
HAPTION INCA 6D 力反饋裝置
INCA 6D為一款6自由度觸覺裝置,,設(shè)計(jì)專用于虛擬現(xiàn)實(shí)環(huán)境。

由于其大工作空間和高性能等特點(diǎn)INCA 6D與CAD數(shù)字化模型之間能夠?qū)崿F(xiàn)成規(guī)模的互動(dòng),。
主要應(yīng)用領(lǐng)域包括:
? 人體工程學(xué)研究
? 可及性研究
? 裝配仿真
? 項(xiàng)目審查
技術(shù)特點(diǎn)

INCA 6D是當(dāng)下市場(chǎng)中唯一的一款力反饋系統(tǒng),,提供如下特點(diǎn):
?所有6自由度上的力反饋( 3個(gè)平移和3個(gè)旋轉(zhuǎn))
?操作工作空間取決于電機(jī)和線纜的位置
?最大力度為40N( 15 N連續(xù)),即提供足夠高度模擬重物操作
?最大旋轉(zhuǎn)扭矩為5 Nm (1,5 Nm持續(xù))
?設(shè)備自身重量的精確靜態(tài)補(bǔ)償設(shè)
?模塊化末端效應(yīng)器配備程控開關(guān)
?夾持工具配備接近傳感器,,連接至一項(xiàng)“dead-man”功能:只要用戶未在手中持有夾持工具,,或者當(dāng)用戶松開手中的夾持工具時(shí),電機(jī)將關(guān)閉,,不會(huì)發(fā)生任何主動(dòng)活動(dòng),。
?易于安裝,僅需幾分鐘,。易于組裝和拆卸,,這對(duì)于其他應(yīng)用中繼續(xù)使用房間非常重要。
?主操作系統(tǒng)提供開發(fā)工具包(API)
?證明與目前市場(chǎng)上的主流應(yīng)用軟件具有兼容性,,可使用專用插件:VortexTM,、HavokTM,、ODE、VirtoolsTM,、CatiaTM V5,、OpenMask等。
?兼容跟蹤裝置如ART
注意:Inca為基于Sato教授所創(chuàng)建的SPIDAR TM

INCA 6D設(shè)備工作區(qū)
INCA 6D由高度電機(jī)模塊組成,,工作區(qū)取決于電機(jī)模塊的位置,。例如,在3mx3mx3m的立方結(jié)構(gòu)內(nèi),,工作區(qū)將為1.50x1.50x1.50m ,在所有方向上可獨(dú)立旋轉(zhuǎn)+ / -40,。由此,,觸覺接口是一個(gè)6自由度的移動(dòng)設(shè)備,在所有方向上提供力反饋,。
位置分辨率為0.2mm,。
模塊化
用戶使用位于頂端的夾持器或手柄(稱為“效應(yīng)器”)持有觸覺裝置。末端效應(yīng)器容易拆卸和更換,,因而可以頻繁更換工具,,以實(shí)現(xiàn)定制應(yīng)用并加強(qiáng)沉浸感覺。夾持工具配備有3個(gè)按鈕,。其中一個(gè)按鈕鍵專為補(bǔ)償功能設(shè)計(jì)(見如下描述的控制系統(tǒng)功能),。其他按鈕狀態(tài)可使用VIRTUOSE API訪問。
::產(chǎn)品規(guī)格::
| 規(guī)格 | HAPTION INCA 6D 力反饋裝置 |
傳輸線的最大力: | 30 N |
| 傳輸線的連續(xù)力: | 10 N |
| 立方體尺寸 | 3x3x3米 |
| 傳輸線的卷繞長(zhǎng)度: | 2.5米 |
| 預(yù)張力電纜的力度值: | 5 N |
| 預(yù)張力電纜的卷繞長(zhǎng)度: | 1.0米 |
| 長(zhǎng)度測(cè)量分辨率: | 7.10-6米 |
| 制動(dòng)器尺寸: | 0.1× 0.2 X 0.3米 |
| 制動(dòng)器重量: | 2.5公斤 |
| 重量平衡: | 靜態(tài)部分(機(jī)械,,彈簧) |
| 按鈕數(shù)目: | 3個(gè) (1個(gè)離合器,,2個(gè)特定應(yīng)用) |
| 工具變換器: | 提供 |
::應(yīng)用范圍::
適用于項(xiàng)目審查、人機(jī)工程學(xué)分析,、功能測(cè)試,、裝配/拆卸、工作環(huán)境仿真,、操作人員培訓(xùn),、醫(yī)療培訓(xùn)、遠(yuǎn)程外科手術(shù)等虛擬現(xiàn)實(shí)應(yīng)用領(lǐng)域,。
::技術(shù)特征::
?所有6自由度上的力反饋( 3個(gè)平移和3個(gè)旋轉(zhuǎn))
?操作工作空間取決于電機(jī)和線纜的位置
?最大力度為40N( 15 N連續(xù)),,即提供足夠高度模擬重物操作
?最大旋轉(zhuǎn)扭矩為5 Nm (1,5 Nm持續(xù))
?設(shè)備自身重量的精確靜態(tài)補(bǔ)償設(shè)
?模塊化末端效應(yīng)器配備程控開關(guān)
?夾持工具配備接近傳感器,連接至一項(xiàng)“dead-man”功能:只要用戶未在手中持有夾持工具,,或者當(dāng)用戶松開手中的夾持工具時(shí),,電機(jī)將關(guān)閉,不會(huì)發(fā)生任何主動(dòng)活動(dòng),。
?易于安裝,,僅需幾分鐘,。易于組裝和拆卸,這對(duì)于其他應(yīng)用中繼續(xù)使用房間非常重要,。
?主操作系統(tǒng)提供開發(fā)工具包(API)
?證明與目前市場(chǎng)上的主流應(yīng)用軟件具有兼容性,,可使用專用插件:VortexTM、HavokTM,、ODE,、VirtoolsTM、CatiaTM V5,、OpenMask等,。
?兼容跟蹤裝置如ART
::下載資料::
Datasheet_Inca中文版





















































備")
備")
備")
備 觸覺設(shè)備 6自由度")

備")


備")
備")

備")
備")
備")
備 觸覺設(shè)備 6自由度")

